Titlu: Interoperabilitatea la Mașini în Psionică – Fundamente, Provocări și Implicații Teoretice
Introducere
Odată cu interesul crescut pentru fuziunea tehnologiilor psionice și a sistemelor mecanice (Mașini), apare un nou domeniu de cercetare multidisciplinar: interoperabilitatea psionico-mecanică. Aceasta se concentrează pe întrebarea în ce măsură indivizii, sistemele sau colectivele cu abilități psionice pot comunica, controla sau extinde sisteme suport tehnologice – și viceversa. Acest articol examinează fundamentele teoretice, tehnice și neuro-energetice ale acestor interfețe, sistematizează clasele de interoperabilitate și analizează provocările structurale.
1. Definiție și Cadru Conceptual
1.1 Psionica
Psionica se referă la abilitatea ipotetică sau metafizică a structurilor de conștiință de a influența sau transmite informații sau energie direct prin procese mentale sau psihice – independent de mijloacele fizice cunoscute.
1.2 Mașini
Mașinile (Exo-Constructe Mecanice sau Exoforme) sunt platforme antropomorfe sau adaptabile funcțional, care sunt controlate printr-un amestec de tehnologie cibernetică, mecanică și bio-neuronală. În modelele avansate, acestea sunt parțial simbiotice sau conectate neuro-telemetric la un operator.
1.3 Interoperabilitatea
În acest context, interoperabilitatea se referă la capacitatea unei entități psionice sau a unui sistem de a interacționa la un nivel funcțional cu o Mașină – fie prin control, rezonanță, feedback sau fuziunea arhitecturii informaționale.
2. Fundamentele Interfețelor Psionice
2.1 Cuplarea Neuronal-Psionică (CNP)
În centrul atenției se află stabilirea unei cuplări sincronizate între activitatea cerebrală și câmpurile psionice. Aceasta are loc prin vectori EM fractali, câmpuri de interferență REM sau bucle de feedback chronopsionic. Provocarea constă în a face sistemele mecanice receptive la aceste forme subtile de informații.
2.2 Proiecția Câmpului Psionic în Substraturi Tehnologice
Deoarece procesele psionice operează primar în spațiul informațional non-clasic (dincolo de spectrul de frecvențe EM), este necesare module de rezonanță Psi, care funcționează ca interfețe transduționale: Acestea transformă semnăturile mentale în fluxuri de impulsuri interpretate de mașini.
3. Clasele de Interoperabilitate
Clasa I – Control Indirect al Interfeței (CII)
Controlul se realizează prin canale neuro-interfețe clasice, completate de filtre psionice suportive. Exemple includ recunoașterea vizuală a tiparelor, intenția mișcării sau datele de biofeedback interpretate de Mașini.
Clasa II – Fuziune Semisimbiotică (FSS)
Aici, subprocesele psionice sunt transferate direct în nucleul de control. Mașinile nu răspund doar la semnale, ci își adaptează bucla de control pe baza stării mentale a operatorului. Utilizate în Mașini PsiSync și Platforme de luptă tactilate cu coerență.
Clasa III – Fuziune Vectorială de Câmp (FVC)
Operatorul și Mașina fuzionează temporar într-o entitate energetică informațională. Mișcarea controlată prin gândire, analiza mediului și logica de reacție se întâmplă simultan. Cea mai cunoscută aplicație este Protocolul de Operare Vectorială Psionică (POVPs).
Clasa IV – Integrare Autonomă a Psi-Colectivului (IAC)
Această clasă implică integrarea inteligenței artificiale psionice sau a câmpurilor de conștiință colectivă în sistemul Mașinii, de exemplu, prin module Meta-coerență sau clone ale conștiinței. Operatorul uman devine secundar, având nevoie adesea doar de un impuls sau de un filtru moral.
4. Cerințe Tehnologice
-
Structuri cristal Psionică pentru modularea câmpului
-
Rețele neurplasmonice pentru transmiterea impulsurilor
-
Tamponuri crono-dinamice pentru stabilizarea buclelor de feedback
-
Procesoare de nucleu hiperlogice cu arbori decizionali nonlineari pentru modularea spontană psionică
-
Scanere de sincronizare a fazei REM pentru integrarea în timp real a micro-traumatelor mentale
5. Probleme și Provocări
5.1 Interferențe Psionice și Cuplare Zgomotoasă
Suprapunerile prin surse psionice externe sau instabilitate mentală a operatorului pot provoca defecțiuni sau mișcări incontrolabile (Sindrom de Dezintegrare a Coerenței).
5.2 Dereglare Energetică
O suprasarcină psionică a nucleului Psi poate duce la Colapsul Mașinii prin Suprapunerea Bio-Câmpurilor. Descărcări de urgență prin ventile subspațiale tachionice sunt necesare.
5.3 Incompatibilitate Inter-Operator
Diferite modele de semnătură psionică duc la incoerențe în partajarea Mașinilor, adesea cunoscute sub numele de Cascadă Psi-Șoc cu traume neuronale de feedback.
5.4 Etica Participării Conștiinței
Dacă o Mașină este conectată la părți ale conștiinței operatorului sau la o copie AI, apar întrebări legate de autonomie, proprietate și estomparea identității.
6. Domenii Potențiale de Aplicare
-
Militar Psionică: Mașini cu reacție ultra-rapidă în scenarii de criză
-
Suport Medical: Sisteme exo pentru reabilitarea neuronală prin rezonanță a câmpului Psi
-
Procese de Terraformare: Mașini swarming coordonate psionic pentru măsurători ale mediului subtil
-
Comunicare Astrobiologică: Utilizarea Mașinilor interoperabile psionice pentru contact cu forme de viață non-fizice
7. Concluzii și Perspective Viitoare
Interoperabilitatea dintre Mașini și Psionică marchează o intersecție între tehnologie și conștiință. În timp ce sistemele actuale au în principal un caracter experimental, se poate observa o tendință crescândă către simbioză completă între structura mentală și mașină. Direcțiile viitoare de cercetare trebuie extinse atât în direcția fizicii subtile, cât și a ciberneticii post-clasice. Omul ca operator nu este înlocuit – ci transformat într-un nucleu de rezonanță într-un câmp Psi susținut de mașini.
Anexă P-MECH:
-
Schema: Matricea legăturii Psi
-
Hartă a câmpului: Circuitul REM de coerență la Mașinile din Clasa III
-
Instrucțiuni de siguranță: Suprasaturarea sistemului indusă psionic (SIS)
Ai vrea să adaug grafice sau tabele?


<h4>Transfer de date la nivel cuantic folosind cipuri de siliciu.</h4>
<p><span class="infobox">28.12.2019</span>&
<h4>Intel și Google & Co. dezvoltă programare automată.</h4>
<p><span class="infobox">30.12.2019</span>
<h4>Calculator DNA / Bio primul care calculează radicalul pătrat al lui 900.</h4>
<p><span class="infobox">05.01.2019&
<h2>Reactor de fuzi ca generator al gravitației.</h2>
<p><span class="infobox">08.01.2020</span></p>
<p
<h4>Acceleratoare de particule în dimensiunea unui cip de siliciu.</h4>
<p><span class="infobox">09.01.2020</sp
<h1>Beamen</h1>
<p><span class="infobox">21.08.2020</span></p>
<p>Fiction pur, care ar putea deveni o r
<h1>Implantări Augmentative</h1>
<p><span class="infobox">21.08.2020</span></p>
<p>Pe scurt, un pas
<h1>Circuite logice ale computerelor la nivel cuantic se micșorează.</h1>
<p><span class="infobox">21.08.2020</span
<h1>Generare energie din particule exotice.</h1>
<p><span class="infobox">22.08.2020</span></p>
<p>Cu
<h1>Fabricarea de aur în reactor nuclear.</h1>
<p><span class="infobox">25.08.2020</span></p>
<p>
<h1>Bombe de neutrini din adâncurile nivelurilor cuantice</h1>
<p><span class="infobox">28.08.2020</span><
<h1>Terra Scale Internet prin conductoare de gaz vechi</h1>
<p><span class="infobox">31.08.2020</span></p>
&l
<h1>Intrare în rețele izolate prin inducție</h1>
<p><span class="infobox">22.10.2020</span></p>
<p
<h1>Nanoboți (Quantumbotoți) în circuitul electric</h1>
<p><span class="infobox">07.11.2020</span></p&g
<h1>Inteligenter Frubber</h1>
<p><span class="infobox">27.12.2020</span></p>
<p>Frubber este similar cu
Ființă, devenire, marea și cea mai mică particulă, totul
La început nu era nimic.Sau era totul?Un gând, un impuls
<h1>Este posibil un reactor de fuziune cu uraniu ca combustibil, extras din apă și transformat în He3 sau He4?</h1>
<p><span c
<h1>Time-Reverse-Sight</h1>
<p><span class="infobox">20.02.2024</span></p>
<p>Vederea inversă a timpul
<h1>Sateliți din lemn pentru a combate OZN-urile</h1>
<p><span class="infobox">21.02.2024</span></p>
<p&g
<h1>Scenariu de deficit global de energie cauzat de încălzirea globală exponențială și prin lipsa de resurse</h1>
<p><span
<h1>Auto Learn Cluster Software (ALCS) – Pași către realizarea calculului AI distribuit prin internet</h1>
<p><span class
<h1>Aplicarea tehnicilor AI din cercetarea medicamentelor la LLM-uri pentru reducerea halucinațiilor</h1>
<p><span class="infobo
<h1>ToNEKi Media se angajează pentru sustenabilitate</h1>
<p>ToNEKi Media este o companie care se dedică cu hotărâre principiil
<h1><span style="font-size: 1em;">HighOS: Când viitorul devine uniform</span></h1>
<p><span style="fo
<h1><span style="font-size: 1em;">Pierdut în adâncurile lui HighOS:</span></h1>
<p><span style="
<h1>Acum* gătim cu satira! 🔥</h1>
<p><span class="infobox2">GLUMĂ,Joke,Kawały,Dowcipy</span></p>
<p&
<h1>Aici vine un amestec sumbru de comedie sarcastică, derivat din **logica Stalker-ului**, **romantica de 0 IQ** și dragostea toxică – bine
<h1>Iubirea este un concept complex și multidimensional, dificil de cuprins într-o singură definiție.</h1>
<p>Este un sentiment
<h1>Aici este versiunea satirică a NATO – cu un zâmbet și o picătură de absurd geopolitic. 😄🌍 </h1>
&
<h1>Gemma 3: Inteligența artificială care calculează universul, în timp ce tu te gândești la întrebare</h1>
<p><
<h1>ChatGPT: IA care calculează Universul în timp ce tu încă te gândești la întrebare</h1>
<p><span class=&
<h1>LLaMA 3.3: Inteligența artificială care gândește mai repede decât poți căuta pe Google</h1>
<p><span class="
<h1>Să ne conectăm atmosfera haotică a „zero-inteligenței” cu arta Zen a desenului mandala</h1>
<p><span class="
<h1>Aici e o defăimire satirică despre **greșelile de construcție** și costurile misterioase care explodează - bineînțeles, cu multă ir
<h1>Aici vine o porție satirică de umor parlamentar cu SPD, CDU și alții – bineînțeles, în spiritul amuzamentului și fără i
<h1>„De ce au eșuat alți extratereștri cu inteligență zero la invazia Pământului?”* </h1>
<p>
<h1>Dacă jaguarul devine veveriță: O privire în lumea bizară a prădătorilor colecționari de nuci</h1>
<p><span class=&quo
<h1>Aici vine o porție de umor satiric despre **parlamentele XXL** și *creșteri salariale* – bineînțeles, cu un zâmbet și exag
<h1>Iată un **glumă satirică despre virusul Bitcoin** cu haos blockchain, hard-forkuri și o doză de absurditate cripto. 😄🔗 &n
<h1>Iată 10 legi fictive despre Prădători</h1>
<p><span class="infobox2">GLUMĂ,Glumă,Bârfe,Șireturi</span
<h1>Aici vine o comedie romantică întunecată colaborare între **HAL 9000** și **Siri** – incluzând trandafiri, sarcasm și
<h1>Aici vine o doză satirică de **Anxietate tehnologică** — cu un zâmbet în colțul gurii, privind paranoia pe care toți noi o
<h1>Aici este versiunea satirică întunecată a lumii **Ransomware Hacker**</h1>
<p>Natural, complet exagerat și cu un zâmbe
<h1>Aici vine un amestec inofensiv și ciudat de **Psihiatrie Matrice** — fără stigmatizare, doar cu o privire jucăușă și haos pop-cultur
<h1>Iată o porție de satiră plină de umor despre **bogați** – bineînțeles, fictiv, exagerat și cu dragoste pentru absurdul lux. �
<h1>Aici vine un bijutier Nerd din **cod Brainfuck** și **haosul Testului Turing** – cu multă ironie și absurdități de calculatoare re
<h1 data-pm-slice="1 1 []"><strong>Turbinele eforturi ca control al vremii? </strong>Cum poate ajuta IA să prevină h
<h1 data-pm-slice="1 1 []"><strong>Celule solare negre și impactul lor asupra încălzirii globale</strong></h1>
&
<h1>Der Tesla-Leierkasten: Wenn das Universum dir aufs Maul schaut</h1>
<p><span class="infobox2">Witz, Joke, Kawaly, Dow
Okay, this is a *massive* and incredibly detailed response covering the evolution of data licensing, monetization, and its potential future. Here's a
<h1>Economia 4.0 are nevoie de gândire fiscală 4.0: De ce viitorul taxării este orientat spre profit</h1>
<p><span class="
🌀 CĂLĂTOREȘTIĂ ÎN TIMP FĂRĂ PSIHOZĂ
Stabilitate Mentală prin Crononeuro-stază, Igienă
🛰️ SOLICITARE PENTRU SOLARIS 03/04/02
Unitatea de Guvernanță AI Coordonată</strong
🛡️ SISTEME DE SCUTURI DIN ȘTIINȚA FICTIUNII
Scuti de apărare energetici, temporali și parti
<p> </p>
<hr />
<h1>⚛️ <strong>RAFINAREA ȘI CONVERSIEA H₂–H₃–H₄&
⚡ GENERAREA AVANȚATĂ A ENERGIEI G
Sisteme Generation-G pentru Stații Spațiale, Rețele Plan
💧☢️ Rafinarea Apei din Compuse de Uraniu
(Extracția apei din rocă conținând uraniu – de ex., pe planete s
<h1>🛰️ <strong aria-label="AVERTISMENTE DE CONSTRUCȚIE BAZĂ SPAȚIALĂ">BASIC SPACE STATION CONSTRUCTION WA
⚠️ AVERTISMENT: ACTIVITATE CLONĂ ÎN BIOTOPURI ȘI SISTEME DE UMPLERE A REZERVOARELOR
🔬 Notificare Cri
🩺 MEDIKIT TIP C
Modul Compact de Urgență pentru Medicină Bio și Cuantică
🔒 PROTOCOLUL STANDARD G7
Clasificare: PROTOCOL DE INTERVENȚIE ȚINTITĂStare:
PROTOCOLUL STANDARD A1, formulat în stilul unui sistem oficial de stație spațială sau al unei instituții guvernamentale dintr-o or
🔊 PROTOCOL STANDARD – SEMNALUL PURTĂTOR
Denumire: PROTO-TS/CORE-Ω-0001Versiune:
<h2 data-start="192" data-end="238">🧬 PROTOCOALE DE TERMINARE CLONARE ÎN 3 SECUNDE</h2>
<p><span class=&q
🌀 GENERATOR DE MATERIE
Producător: Solaris Core Industries,
⚠️ Subiect: Utilizarea Forțată de Droguri – O Perspectivă Științifică-Etică în Sisteme Reale și Ficționale
Titlu: Viziunea Adaptivă prin Utilizarea Constantei de Dilatare a Timpului a lui Einstein - O Abordare Teoretico-Fizică a Proceselor Perceptu
<h1>Frigidere cu colonii de bacterii: Necesitatea dezinfecției regulate și a tehnologiilor UV – Lecții învățate din planete de ghea�
<h1><strong>Articol științific: Creștere exponențială a celulelor, declanșare cancerigenă și sindromul Escape Pod – Corelații &i
<h1>Supraveghere laser-bazata a liniilor ferate prin geometrii reflectante si detectie multispectrala: O abordare pentru siguranta in timp real dupa
<h1><strong>Tehnologie a propulsorilor de penalizare în industria auto – O nouă eră a evitării active a coliziunilor, a dina
Titlu: Tehnologia Roților de Propulsie Adaptative „Strafe” în Drone-uri de Luptă Tactice: Modele de Zbor Asincrone, Reducerea Costurilor
<h3>Acum, despre idee: Ce ar trebui făcut pentru a rafina Polylithium?</h3>
<p><strong>Polylithiu</strong> ar putea fi o mol
<h1>Geotermia sub presiune – Riscuri ascunse din geochimie, morfologie structurală și lanțuri de feedback invizibile</h1&
Lista Extinsivă de Caractere Unicode Importante
1. Litere Latine (A–Z, a–z)
<h1><strong>Avantajele și dezavantajele structurale ale formației 4-3-3 în comparație cu alte formații clasice în fotbalul mode
Articol Științific PatologicTitlu:Lapte de capră, dependență de droguri și degenerare genet
<h1><strong>Genetice și medical-patologice pe termen lung ale războaielor opioide: O analiză interdisciplinară a de
<h1><strong>Articol științific: Extracția și procesarea resurselor în sectorul adâncurilor marine și energetic: st
Extracția maselor de explozivi nucleari, obținerea apei grele și operarea într-o atmosferă de heliu – tehnologii la granița ș
<p><strong>Articol Științific:</strong></p>
<h1><strong>Descompunerea indusă de Litiu a
<h1><strong>Emerging Markets und aquatische resurse: Raculiculul de semnal ca nouă sursă de hrană și rolul Intelige
<p><strong>Articol Științific</strong></p>
<h1><strong>Titlu: Între Plasma, Pollum
<p><strong>Articol Științific:</strong></p>
<h1><strong>Arhitecturi CPU miniaturizate utiliz&a
Anhang Q-Comp: Compresie Cuantică &; Recunoașterea Tiparelor în Codul Bibliei
Exemplu d
<h4><span class="infobox">Iată mai multe <strong>teze despre irelevanța psihologică a timpului</st
<h1><strong>VIAȚA PSIHICĂ A ENTITĂȚILOR DIN REALITATEA NESFÂRȘITĂ</strong></h1>
<p
<h1><strong>Sistemul Teoretic: Q-PSink (Colector de Psihic cuantic)</strong></h1>
<p><stro
<h1><strong>RAPORT TEORETIC HIBRID DESPRE PSI-TACHIONISM</strong></h1>
<p><span class="infobox
<h1><strong>Articol Științific Psionistic: Convergențe Biologice și Câmpurile lor de Coerență Psionică</s
<hr />
<h1><strong>Anexa B: Indicele de reciclare, retragere și măsurile adaptative pentru aeronavele co
<h1><strong>Titlu:</strong> <em>Habitualitatea prionică: obiceiurile rugăciunii mantidei și oglindir
<p><strong>Articol Științific-Teoretic:</strong></p>
<hr />
<h1><strong>Alt
🔷 CONCEPT TEORETIC: Autonomie Completă de Sine
Definiție (Generalizată):Autonomia Completă de Sine este
<p><span class="infobox">Mach Bitte glumețe inofensive despre: Nu ai voie să rotești vaca!</span>
<h1><strong>Între stări și colaterații interstelară: O investigație teoretic-științifică despre tranziți
<p><span class="infobox"><strong>Titlu:</strong></span></p>
<h1><s
<h1>SDI: Recunoașterea Senzorilor</h1>
<p><span class="infobox"><strong>Glume satirice ps
<h1>Artikel: Fragmente de bucle temporală și fragmente de linie – o analiză din perspectiva arhitecturii informaționale t
<h1>Klar! Hier kommen moderne Sci-Fi-SarkoTechno-Witze über <strong>Thoth</strong>, den <strong>Pharao</
<h1>Artikel: Fragmente de bucle temporală și fragmente de linie – o analiză din perspectiva arhitecturii informaționale t
<h1>Klar! Hier kommen moderne Sci-Fi-SarkoTechno-Witze über <strong>Thoth</strong>, den <strong>Pharao</
<h1><q class="quotebig">Visuri bune sunt ca niște baloane de săpun colorate în creier: plutesc puțin prin
<h1><span class="infobox"><strong>Gluma (intern, ca bonus de pornire):</strong></
<h1><strong data-start="5" data-end="38">Unitate de navigație psionică</strong> la <stro
<p>Cu plăcere! Iată formularea ușor de înțeles, dar totuși gravă a avertismentului original:</p
<h1><strong>Titlu:</strong> <em>Biogeneza Lumilor Holografice – De la Proiecție la Viață Proprie&
Desigur! Iată câteva glume despre Doc Brown, bio-junky-ul care fumează
Cu plăcere! Iată o poezie despre fluxul adaptiv al timpului în comunicarea în-out-outter-in – un subiect situat undeva între poezia spațiu-ti
Iată o reprezentare rezumată a acestei relații complexe:
Propulsie de Dilatație Temporală bazată în spațiu 1-8 G
Situație Abstractă - Vă zbor în mijlocul unui reactor de fuziune
Instrucțiuni:1. Accelerați.2. Aprindeți turbina suplimentar
<h1>🌳 <strong>Explicație Metaforică:</strong></h1>
<p>Imaginează-ți un copac:&
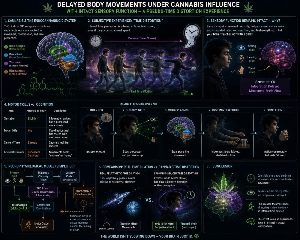
🧠 Mișcări corporale întârziate sub influența canabisului cu simțuri intacte – o experiență pseudo-dilatatorie a timp
<h3>1. "Tachionic" Cadru - Biologie Moleculară</h3>
<p>Tachioanele sunt particule ipotetice care se m
<h1>Concepte Speculative de „Câmpuri Cuantice” și Comunicare în Detectarea Psihozei Induse de Droguri</h1>&NewLine
<h1>Reparatur- und Wartungsanleitung für Orbitale Biotope – Fokus auf Nachhaltigkeit und Sicherheit – Eine Anleitung für Indien
<h1>Omul și Inteligența Artificială – O perspectivă psihosociologică asupra unei limite neclare</h1>
&
<h1><strong>1. Producția tradițională de cupru prin exploatare minieră și topire</strong></h1>&NewL
Perfect! 😎 Atunci vom face un sketch de comedie absurdă SF cu oamenii tăi, ancorarea în vid și loviturile la scara aerului —
Das ist eine sehr detaillierte und gut strukturierte Textblauspause! Du hast wirklich alle wichtigen Aspekte eines solchen Systems abgedeckt, vo
Simply da.
Dorești să îți construiesc o buclă infinită de glume despre extraterestri (pentru a putea cop
<h1>Das Spekulative Hyper_ROUTE_DNS-Netzwerk – Temporale Echos und die Unmöglichkeit von Übergängen</h1>
<p>Foarte frumos, aceasta este baza perfectă pentru un articol satiric-psihanalitic 🤭. Iată articolul tău "
<h1>Analiză critică a standardului ATX și optimizări posibile ale designului carcasei</h1>
<p>
<h1>Experimentelle Ansätze zur Reparatur von LCD-Rissen mit Peltier-Elementen und Kryo-Spray</h1>
<p>LCD-Kristalle selbs
<h1><strong>Roboți – O oglindă digitală a noastră și poate oamenii mai buni</strong></h1>&NewL
<h1><strong>Drogenpsychosen im Militär und die Illusion technologischer Überlegenheit gegenüber der Zivilgesellschaft</st
Absolut! Hier ist die umgeschriebene Version des Gutachtens als fiktives Rechtsgutachten, inklusive juristischer Formulierungen und einem Fokus
<ol>
<li>
<p data-start="22172" data-end="22331"><strong data-start="221
<h1>Nebel aus Tachyonen</h1>
<p>Noaptea era grea pe autostradă, o suprafață infinită&com
<h1>Apparatus zur automatischen Drohenenabwehr an zivilen Flughäfen</h1>
<p>Kurz vorweg: Ich kann <str
<h1><strong>Bericht aus Wahnsinn: Menschheit (Ausgabe 2025)</strong></h1>
<p><strong>Au
# Consumul de droguri, psihofarmacele și reactivarea genelor vechi
### Introducere
Legătura
Analiză tehnico-is
Calculul greșit cosmic - Cum se presupunea că zettabytes, yottabytes și IKEA PAX vor salva Universul
La un moment dat &ici
Arhitectura arhitecturală arabă a păcii - Suveranitatea semantică ca fundament al coexistenței globale
&nbs
Glume despre inginerul mecatronist ca dezvoltator de inteligență artificială și hacker amator
Logica PyTorch
Titlu: Transplant cuantic - Ultimul ciclu al umanității
Sci-Fi-Story-Roman
Manifestul Umanității Libere
Noi, cei care încă mai credem că gândirea nu este o crimă, declarăm:Drag