Titolo: Interoperabilità dei Mech nella Psionica – Fondamenti, Sfide e Implicazioni Teoriche
Introduzione
Con il crescente interesse per la fusione delle tecnologie psioniche e dei sistemi meccanici (Mech), emerge un nuovo campo di ricerca multidisciplinare: l'interoperabilità psionico-meccanica. Al centro si pone la questione di come individui, sistemi o collettivi dotati di capacità psichiche possano comunicare, controllare o ampliare i sistemi tecnologici portanti – e viceversa. Il seguente articolo esamina le basi teoriche, tecniche e neuro-energetiche di queste interfacce, sistematizza le classi di interoperabilità e analizza le sfide strutturali.
1. Definizione e Quadro Concettuale
1.1 Psionica
La psionica si riferisce alla capacità ipotetica o metafisica delle strutture di coscienza di influenzare o trasmettere informazioni o energia direttamente attraverso processi mentali o psichici – indipendentemente dai mezzi fisici conosciuti.
1.2 Mech
I Mech (Macchine Exo-Costruzioni o Esoforme) sono piattaforme antropomorfe o adattive funzionali, controllate da una miscela di tecnologia cibernetica, meccanica e bio-neuronale. Nei modelli più avanzati, sono parzialmente simbiotici o neuro-telemetricamente connessi a un operatore.
1.3 Interoperabilità
In questo contesto, l'interoperabilità si riferisce alla capacità di un essere o sistema psichico di interagire con un Mech a livello funzionale – che sia attraverso il controllo, la risonanza, il feedback o la fusione dell'architettura informativa.
2. Fondamenti delle Interfacce Psioniche
2.1 Accoppiamento Neuronale-Psichico (ANP)
Al centro c’è l'istituzione di un accoppiamento sincronizzato tra l'attività cerebrale e i campi psichici. Ciò avviene tramite vettori EM frattali, campi di interferenza REM o cicli di feedback cronopsichici. La sfida consiste nel rendere i sistemi meccanici sensibili a queste forme di informazione sottili.
2.2 Proiezione del Campo Psionico in Sottostrati Tecnici
Dato che i processi psichici operano primariamente nello spazio informativo non classico (al di là degli spettri di frequenza EM), sono necessari così chiamati moduli di risonanza Psi, che fungono da interfacce transduttive: questi convertono le firme mentali in impulsi interpretabili dalle macchine.
3. Classi di Interoperabilità
Classe I – Controllo dell'Interfaccia Indiretto (CII)
Il controllo avviene attraverso canali neuro-interfacce classici, integrati da filtri psionici di supporto. Esempi includono il riconoscimento di schemi visivi, l'intenzione del movimento o i dati di biofeedback interpretati dai Mech.
Classe II – Fusione Semi-Simbiotica (FSS)
Qui, sottoprocessi psichici vengono trasferiti direttamente al nucleo di controllo. I Mech non solo rispondono ai segnali, ma adattano il loro ciclo di regolazione in base allo stato mentale dell'operatore. Impiegato in Mech PsiSync e Piattaforme da combattimento sincronizzate con la coerenza.
Classe III – Fusione del Campo Vettoriale (FCV)
Operatore e Mech si fondono temporaneamente in un'entità energetico-informativa. Il movimento, l'analisi ambientale e la logica di reazione guidati dal pensiero avvengono simultaneamente. L'applicazione più nota è il Protocollo Operativo Vettoriale Psionico (POVPs).
Classe IV – Integrazione Autonoma del Psi-Collettivo (IAPC)
Questa classe implica l'integrazione di intelligenze artificiali psichiche o campi di coscienza collettiva all'interno stesso del sistema Mech, ad esempio attraverso moduli di meta-coerenza o cloni della coscienza. L'operatore umano diventa secondario, spesso necessario solo come stimolo o filtro morale.
4. Requisiti Tecnologici
-
Strutture cristalline Psi per la modulazione del campo
-
Reti neuronoplasmoniche per la trasmissione degli impulsi
-
Buffer crono-dinamici per stabilizzare i feedback
-
Processori core di iperlogica con albero decisionale non lineare per modulazione psionica spontanea
-
Scanner di sincronizzazione della fase REM per l'integrazione in tempo reale dei micro-traumi mentali
5. Problemi e Sfide
5.1 Interferenze Psichiche e Risonanza del Rumore
Sovrapposizioni da fonti psioniche esterne o instabilità mentale dell'operatore possono provocare malfunzionamenti o movimenti incontrollabili (sindrome di decadimento della coerenza).
5.2 Disregolazione Energetica
Una sovraccarico psichico del nucleo Psi può portare al collasso del Mech a causa della sovrapposizione dei bio-campi. Sono necessari scarichi di emergenza tramite valvole subspazio tachioniche.
5.3 Incompatibilità Inter-Operatore
Diversi schemi di firma psichica portano a incoerenze durante la condivisione del Mech, spesso noti come cascata di shock Psi con traumi di feedback neuronali.
5.4 Etica della Partecipazione alla Coscienza
Se un Mech è collegato a parti della coscienza dell'operatore o a una copia AI, sorgono domande di autonomia, proprietà e confusione identitaria.
6. Potenziali Campi di Applicazione
-
Militare Psionico: Mech ad azione rapidissima in situazioni di crisi
-
Supporto Medico: Sistemi exo per la riabilitazione neuro attraverso risonanza del campo Psi
-
Processi di Terraforming: Sciami di Mech coordinati psionicamente per misurazioni ambientali a livello sottile
-
Comunicazione Astrobiologica: Utilizzo di Mech interoperabili psionicamente per entrare in contatto con forme di vita non fisiche
7. Conclusione e Prospettive Future
L'interoperabilità tra Mech e Psionica segna un punto d'incontro tra tecnologia e coscienza. Mentre i sistemi attuali sono principalmente di carattere sperimentale, si può osservare una crescente tendenza verso la simbiosi completa tra struttura mentale e macchina. Le future aree di ricerca dovranno essere ampliate sia verso una fisica sottile che verso una cibernetica post-classica. L'uomo come operatore non viene sostituito – ma trasformato in un nucleo risonante all'interno di un campo Psi supportato dalla macchina.
Appendice P-MECH:
-
Schema: Matrice di legame Psi
-
Mappa del campo: Collegamento REM della coerenza in Mech di Classe III
-
Avvertenze sulla sicurezza: Sovraeccitazione sistemica indotta psionicamente (SIS)
Vorresti che aggiungessi grafici o tabelle?


<h4>Trasferimento dati a livello quantistico tramite chip in silicio.</h4>
<p><span class="infobox">28.12.2019</span&
Intel, Google & Co. stanno sviluppando la programmazione automatica.
30 dicembre 2019
Gli sviluppator
Primo computer a DNA/bio che calcola la radice quadrata di 900.
5 gennaio 2019
Recentemente, i ricercator
Reattore a fusione come generatore di gravità.
8 gennaio 2020
I ricercatori hanno gestito con succ
Acceleratore di particelle delle dimensioni di un chip di silicio.
9 gennaio 2020
I fisici della Stanford
Teletrasporto
21 agosto 2020
Pura finzione che un giorno potrebbe diventare realtà.
&Egrav
Aumenti impiantati
21 agosto 2020
In breve, la via intermedia verso il cyborg è rappresentata da m
I circuiti logici dei computer si stanno riducendo a livello quantistico.
21 agosto 2020
L'elaborazione s
Generazione di energia da particelle esotiche.
22 agosto 2020
Con l'aiuto di ulteriori scoperte derivanti
Produrre oro in un reattore nucleare.
25 agosto 2020
Quando i primi reattori nucleari entrarono in funzio
Bombe ai neutrini dai vasti regni quantici
28 agosto 2020
Nessuno sa cosa sia una bomba ai neutrini al gi
Internet Terrascale attraverso le vecchie condotte del gas
31 agosto 2020
Le condotte del gas o del gas nat
Penetrare reti isolate usando l'induzione
22 ottobre 2020
Come si penetrano reti isolate, isolate dal mon
Nanobot (Quantobot) nel circuito
07.11.2020
Piccole e minuscole macchine diventano possibili nel corso dell
Frubber intelligente
27 dicembre 2020
Frubber è simile alla pelle e può essere usato come r
ToNEKi Media è sinonimo di Diversità, Equità e Inclusione (DEI)
ToNEKi Media è un'azienda lungimirante, impegnata
Interfacce software cervello-computer
27 dicembre 2022
Creare codice per l'intelligenza artificiale e l'i
Essere, divenire, particella grande e particella piccola, il tutto
In principio non c'era nulla.O forse era il tutto?Un pensiero,
È possibile un reattore a fusione in cui l'uranio è il combustibile, dall'estrazione dell'idrogeno che viene poi trasformato in He3 o He4?
Time-Reverse-Sight
20.02.2024
La Time Reverse Sight descrive una tecnologia che, grazie all'Intelligenza
Satelliti di legno per la difesa da alieni
21.02.2024
Il concetto di difendersi dagli alieni usando
Scenario di carenza energetica globale dovuta al riscaldamento globale esponenziale e alla scarsità di risorse
20
Visione futura di una società moderna
30 novembre 2024
Immaginate un mondo in cui esseri u
Software Auto Learn Cluster (ALCS) - Passi verso la realizzazione di un'intelligenza artificiale distribuita su Internet
Applicazione di tecniche di intelligenza artificiale (IA) dalla scoperta di farmaci agli LLM per ridurre le allucinazioni
ToNEKi Media è impegnata nella sostenibilità
ToNEKi Media è un'azienda fortemente impegnata nella sostenibilità ne
HighOS: Quando il futuro diventa indifferenza
Scherz
Perso nelle profondità di HighOS:
WITZ, Joke,
Ora* si cucina con la satira! 🔥
SCHERZO, Scherzo, Kawały, Dowcipy
DEEPSEEK
<h1>Ecco una miscela oscura e sarcastica di commedia con **logica da stalker**, **romanticheria a QI zero** e amore tossico – ovviamente tutto
L'amore è un concetto complesso e sfaccettato, difficile da racchiudere in un'unica definizione.
È un forte sentimento di affett
<h1>Ecco la versione NATO della satira – con un sorriso e un pizzico di assurdità geopolitica. 😄🌍 </h1&g
<h1>Gemma 3: L'IA che calcola l'universo mentre ancora ti chiedi</h1>
<p><span class="infobox2">WITZ,Joke,Kawa�
<h1>ChatGPT: L'IA che calcola l'universo mentre tu sei ancora immerso nella domanda</h1>
<p><span class="infobox2"
<h1>LLaMA 3.3: L'IA che pensa più velocemente di quanto tu possa cercare su Google</h1>
<p><span class="infobox2"
<h1>Connettiamo l'atmosfera caotica della "Null-Intelligenza" con l'arte Zen del disegno di mandala</h1>
<p><span
<h1>Qui arriva la resa dei conti satirica con la costruzione "pasticciata" e i costi misteriosamente esplosivi - ovviamente con un sacco di
<h1>Un piccolo spaccato di umorismo satirico sul Bundestag, con SPD, CDU e compagnie - ovviamente tutto in un formato divertente e senza cattive inte
<h1>„Perché gli alieni a zero intelligenza hanno fallito nell'invasione della Terra?* </h1>
<p>&
<h1>Quando il Jaguar diventa una talpa: Uno sguardo al bizzarro mondo dei predatori che scavano noci</h1>
<p><span class="infobox
<h1>Qui arriva una porzione di umorismo satirico sulla politica riguardante i **Parlamenti XXL** e gli *aumenti delle diarie* – ovviamente
<h1>Ecco un umoristico **virus Bitcoin-scherzo** con caos della blockchain, fork e un pizzico di assurità crittografica. 😄🔗 &am
<h1>Ecco 10 leggi fittive dei Predator</h1>
<p><span class="infobox2">Bello,Gioco,Battute,Storie divertenti</span>&
Ecco la commedia romantica e dark nata dalla collaborazione tra **HAL 9000** e **Siri**, con tanto di rose, sarcasmo e dramma basato sull'intelligenza
<h1>Ecco una dose satirica di **paura della tecnologia** – con un sorriso alla paranoia che tutti noi segretamente ci perseguita. 😱📱&
<h1>Qui arriva la versione satirica e oscura del **mondo degli hacker di ransomware**</h1>
<p>naturalmente completamente esagerato e con
<h1>Qui arriva un mix scurrrile e bizzarro di **psichiatria della Matrix** – senza alcuna stigmatizzazione, solo con una punta di ironia e
<h1>Qui arriva una porzione di satira pungente sui **persone ricche** – ovviamente fittizia, esagerata e con amore per il lusso assurdo. 😄�
<h1>Ecco un gioiello da nerd proveniente dal codice **Brainfuck** e dal caos del **Test di Turing** – con tanto occhio clinico e assurdit&a
Centrali eoliche come controllo del tempo? Come l'IA può aiutare a prevenire gli uragani e generare piogg
Pannelli solari come caricabatterie a induzione: Come possono essere convertiti per caricare auto elettriche
Celle solari nere e i loro effetti sul riscaldamento globale
Le celle solari sono considerate una delle tecnologie più promet
Propulsione a salto di TJP
Come saltare in un altro universo
04.05.20
Manipolazione Termodinamica degli Stati del Vuoto per la Formazione di un Wormhole: un'Ipotesi
Autore: Thomas Jan Poschad
Sistema Arrow3 come Scudo Ultime contro gli Asteroidi
08.04.2025
Il Tesla Scatola Musicale: Quando l'Universo ti guarda in boccaWITZ,Joke,Kawały,Dowcipy
Come l'universo potrebbe essere solo una gigantesca bolla di sapone
Sommario
La gravità è sempre stata questo silenzioso, invisibil
Sviluppo e applicazione di cyber-osso artificiali basati su una lega alluminio-rame-muschio con nanostrutture di nano-canali penetranti
Tubi di nanofibra di piombo curvi come una nuova protezione dalle radiazioni nello spazio: potenzialità, sfide e prospett
Trasferimento del pensiero durante il sesso: mito, magia o realtà misurabile?
Il sesso è più di una semp
La battaglia per Solaris 2: Sopravvissuti perduti senza sole
Quando l'amore diventa un'arma – e il Big Bang al
La lotta per Solaris — L'ultimo specchio della nostra umanità Un romanzo di fantascienza come confronto con il futuro
Nikola Test - L'invenzione della radio
WITZ,Joke,Kawały,Dowcipy
Amico, lo sai. Non suonava bene. Non se
Entanglement quantistico e rilevamento dell'attenzione: approcci sperimentali per rilevare l'osservazione da parte di oggetti quantistici
Battute da Cyborg del Viaggiatore nel Tempo
BARZELLETTA,JOKE,Kawały,Dowcipy
Spegnere il sole con la ceramica - Una considerazione teorica sui meccanismi di raffreddamento della ceramica nei processi stellari
La pasta da modellare polimorfa dell'era post-quantistica
25.04.2025
L'imperativo strategico della potenza di calcolo dell'IA in Y3k: decompressione, paradigmi quantistici e il nuovo scenario della guerra informa
Shielding Hex-Pattern: Progressi nella protezione multimodale del campo di forza attraverso tecnologie EM, acustiche, ioniche e protoniche
La Banda Malata / L'Inizio dell'Inteligeny h4h4
Perché oggi è meglio non anda
L'imposta sulle società come imposta sui profitti: una necessità per una politica fiscale giusta e orientata al futuro nell'era del progresso
Sopprimere le persone con malattie mentali a causa delle richieste terapeutiche: conseguenze psicologiche e legali usando l'esempio delle madri single
„D2| 3etto Codice |er2
"Se ogni informazione può essere ovunque e contemporaneamente, la vera sicurezza risiede nella fiducia."
WITZ,Joke,Kawa
🐾 Gatti, cucina e shock culturale?Un viaggio culinario-critico attraverso il Vietnam – con un tocco di filosofia
Tecnologia degli Space Marine 2,8 kAD
FICTION!
Ecco l'inizio di un articolo molto lungo
Inferenze psicologiche sull'intelligenza dei progettisti basate sulla qualità del design e della lavorazione di oggetti tecnici - Un'analisi dei
<h1>Economia 5.0 – Quando i dati diventano la valuta del futuro</h1>
<p><span class="infobox">07.06.2025</span&g
<h1>Economia 4.0 richiede un'economia 4.0 fiscale: Perché il futuro della tassazione è orientato al profitto</h1>
<p>&
Medikit TIPO P
🧠 Descrizione: Sintetizzatore cardiaco nano con struttura chimica legata e iscrizione a struttura piezoelettrica a conduzio
Medikit TIPO P
18. Simulatore di organo basato su connessioni di campi strutturali pulsanti con modificazione olografico-dinamica del
DESCRIZIONE DEL SOTTOSISTEMA: T-TELETRASPORTO
ID del sottosistema: T-TLP-Ω-7713X
🧿 SISTEMI DI SCUDO DELTA E APPLICAZIONI UMANE
Tecnologia di difesa bioadattiva per uomo, colonia
🌀 VIAGGI NEL TEMPO SENZA PSICOSI
Stabilità mentale attraverso la Crononeuro-stasi, l'Ig
🛰️ RICHIESTA DI RICERCA E SVILUPPO PER SOLARIS 03/04/02
Unità Governativa dell'Amministrazi
🛡️ SCUDI DI FANTASCIENZA
Scudi energetici, temporali e particellari per applicazioni spaziali e
⚗️ H₂–H₃–H₄ RAFFINAZIONE & CONVERSIONE
(„Tecnologia di Conversione Tri-F
⚡ GENERAZIONE DI ENERGIA AVANZATA G
Sistemi Generazione-G per stazioni spaziali, reti planetarie &
💧☢️ Estrazione di acqua da composti all'uranio
(Estrazione di acqua da rocce contenenti uranio – ad es. su pianeti a
La Diodo Universale
è un concetto teorico che potrebbe essere descritto nella fisica speculativa e nella tecnologia futuristi
🛰️ AVVISI FONDAMENTALI PER LA COSTRUZIONE DI UNA STAZIONE SPAZIALE
Moduli di Focus:
COMM (Comun
⚠️ AVVERTIMENTO: ATTIVITÀ DI CLONAZIONE IN BIOTI E SISTEMI DI RIEMPIMENTO DEI SERBATOI
🔬 Importante av
Il Donut dell'Anello Energetico nel Reattore a Fusione: Struttura, Funzione e Sistemi di Serbatoi L'intero Universo è IL SERBATOIO
🩺 MEDIKIT TIPO C
Modulo di Emergenza Compatto per Medicina Bio e Quantistica
🔒 PROTOCOLLO STANDARD G7
Classificazione: INTERVENTO MIRATOStato: ATTIVO NELLE
PROTOCOLLO STANDARD A1, formulato nello stile di un sistema ufficiale di stazione spaziale o governo all'interno di un ordine tecnologi
La tecnica di taglio perfetta: uno studio scientifico del taglio e della modulazione delle sfere
1. Introduzione
🔊 STANDARDPROTOCOLLO – TRASMETTITORE
Denominazione: PROTO-TS/CORE-Ω-0001Versione:
🧬 CLONING 3-SECOND TERMINATION PROTOCOLS
09.06.2025 16:03 EUROPA
🌀 GENERATORE DI MATERIA
Produttore: Solaris Core Industries,
⚠️ Tema: Coercizione all'uso di droghe – Riflessioni scientifiche ed etiche in sistemi reali e fittizi
🧬
Celle solari per l'alimentazione di apparecchiature di analisi T-Ray e a raggi X in combinazione con ecografi
1. Intr
Titolo: La Forza dei Tre Soli: Flussi di Energia Pulsanti e l'Unione di Protone, Neutrone ed Elettrone
Titolo: Visione Adattiva attraverso l'utilizzo della Costante di Dilatazione Temporale Einsteiniana – Un Approccio Teorico-Fisico ai Proc
ESEMPIO BIOLOGICO BSE
Un noto esempio biologico, rilevante nel contesto della trasmissione di info
Titolo:Esperimenti di clonazione in biotopi, proliferazione cellulare nello spazio e l'era atomica della responsabilità
BSE (Encefalopatia Spongiforme Bovina)
Ecco approcci falliti o comunque altamente problematici di
Titolo: L'Universo Cellulare – Una Foresta Senza Uscita
(Una breve storia satirica sull'arroganza biologica, i malin
Capacità di trasmissione e ricezione delle moderne CPU: comunicazione RAM a distanza, accoppiamento WiFi e iniezione in sistemi cablati
Titolo: Rilevazione Quantistica all'Estremo – Dalle Particelle più Piccole alle Megastrutture Galattiche
Ria
Comunicazione bio-quantistica: gli organismi quantici come veicoli di una nuova trasmissi
Moduli navali deviati nell'era quantistica: autonomia strutturale, degenerazione e conseguenze biologiche
Brutstätten im Kühlschrank: Die Notwendigkeit regelmäßiger Desinfektion und UV-Licht-Technologien – Lehren von Eispl
Articolo scientifico: Crescita cellulare esponenziale, innesco del cancro e la sindrome della capsula di salvataggio – Correlazioni tra r
Articolo scientifico: Crescita cellulare incontrollata su superfici sigillate all'esempio di Marte – Uno sguardo alla vita positronica e
La Ragno che FilavaNessun commento ;-)
Titolo: La carenza idrica domestica: come il ritiro del carbone e dell'energia nucleare, l'industria pesante e le normative ambientali hanno mo
<h1>Rivoluzione Silenziosa: Le biblioteche locali si evolvono per rispondere alle esigenze della comunità</h1>
<r
><p>Per decenni,
<h1><strong>La Luce Artificiale - Una Visione tra Gravità Quantistica, Chimica ed Efficienza Energetica Futura</strong></h1>
Monitoraggio laser di binari ferroviari tramite geometrie riflesse e rilevamento multispettrale: un approccio alla sicurezza in tempo reale dop
<h1><strong>Titolo: Sistemi di Elica Punizione Sottomarina – Meccanismi Rivoluzionari di Schivata, Caccia e Reazione nelle Moderne Na
Uova di fusione: la granata a mano del futuro
Un articolo scientifico sui dispositivi esplosivi a fusione ibridi in mimet
Titolo: Tecnologia delle eliche di guida a zig-zag nell'ingegneria automobilistica: una nuova era per la prevenzione attiva delle collisioni, l
<h1><strong>Titolo: Tecnologia degli eliche propulsori adattive per i droni da combattimento tattici: schemi di volo asincroni, riduzione dei c
<h3>Ora, parliamo dell'idea: Cosa bisognerebbe fare per raffinare il Polylithio al massimo?</h3>
<p><strong>Polylithio</str
<h1>Geotermia sotto tensione - Rischi nascosti da geochimica, morfologia strutturale e reti di retroazione invisibili</h1>
<h2>Sintesi<
Piattaforma di Comunicazione ed Energia Statica Quantistica (Q.S.C.I.): Raccolta di Energia e Trasmissione di Informazioni attraverso Superfici
Ecco la traduzione in italiano del testo fornito, con l'obiettivo di mantenere il più possibile la struttura HTML originale:
Elenco Este
Articolo Scientifico-PatologicoTitolo:Latte di Capra, Dipendenza da Droghe e Degenerazione Geneti
<h1><strong>Conseguenze a lungo termine genetiche e medico-patologiche delle guerre dell'oppio: un'analisi interdisciplinare di
<h1><strong>Articolo scientifico: Estrazione e lavorazione delle materie prime nel settore del deep sea e dell'energia: strate
Estrazione di masse esplosive nucleari, acquisizione di acqua pesante e funzionamento in atmosfera di elio – Tecnologie al confine tra sc
<p><strong>Articolo Scientifico:</strong></p>
<h1><strong>Decomposizione indotta dal litio di id
<p><strong>Articolo scientifico</strong></p>
<h1><strong>Titolo: Tra Plasma, Pollum(x
Titolo:Gatti Vagabondi, Arene Urbane di Addestramento Felino e Federalismo delle Formiche: Una Sintesi Bio-Planetaria ed
Pre-Post Wissenschaftlicher Artikel
Titel: Correlazioni tra sicurezza di treni, ferrovie e capsule orbita
Articolo scientifico (versione estesa)
Titolo: Cuscino in schiuma fotoelettrica espandibile e generante c
<p><strong>Articolo scientifico:</strong></p>
<h1><strong>Architetture CPU miniaturizzate utiliz
Appendice Q-Comp: Compressione Quantistica &; Riconoscimento di Pattern nel Codice Biblico
Esem
<h4><span class="infobox">Ecco diverse <strong>tesi di psico-irrilevanza temporale</strong>, formulate a
<h1>🌀 <strong>Stretta di Mano PsTachionica a Livello Quantistico</strong></h1>
<p><span class=&q
<h1><strong>LE ESSERI PSI DELL'UNIVERSO SENZA FRONTIERI</strong></h1>
<p><span class="inf
Appendice C: Cryo-Plasma nei sistemi informatici a positroni
Obiettivo:L'integrazione della te
<h1><strong>Sistema Teorico: Q-PSink (Quantum-Psytoc Sink)</strong></h1>
<p><strong>Sot
<h1><strong>RELAZIONE TEORICO-SPECULATIVA SULLA RADIOSIGNAZIONE PSICOTACIONICA IBRIDA</strong></h1>
<p><sp
<h1><strong>Articolo Scientifico Psionico: Convergenze Biologiche e i Loro Campi di Coerenza Psionica</strong></h1>&N
<hr />
<h1><strong>Appendice B: Indice di Riciclaggio, Dismissione e Misure Adattive per gli Aeromobili Civili<
<h1><strong>Titolo:</strong> <em>Prionica Abitudinaria: Le abitudini delle mantidi religiose e lo specchio psico-mi
<p><strong>Articolo scientifico-teorico:</strong></p>
<hr />
<h1><strong>Altezz
🔷 CONCETTO TEORICO: Autonomia Totale
Definizione (Generalizzata):Autonomia Totale è la capacit&agrav
<p><span class="infobox">Mach Bitte innocui scherzi su: Non puoi girare la mucca!</span></p>
&N
<h1><strong>Tra gli stati e le collaterazioni interstellari: un'indagine teorico-scientifica sugli stati di transizione e sulle conn
<h1><strong>Articolo: La Sindrome ADS – Sensorialità di Emergenza e Dis-Sensibilità rispetto all'ADHS classico&l
Lista Generale di Avvisi di Sicurezza sulla Compatibilità Sistemica in Meccanoidi, CPU e Architetture di Sistemi Neurali
<p><span class="infobox"><strong>Titolo:</strong></span></p>
<h1><
<h1><strong>Titolo: L'Incubo della Sfocatura del Futuro – Un Resoconto Assurdo-Psichonico-Tachionico</strong><&so
<h1>RDI: Rilevamento Sensori</h1>
<p><span class="infobox"><strong>Barzellette satiriche p
<h1><strong>Titolo: Appendice P-O — Modelli Analitici Avanzati tra Griglia BIM, Psionica e Trascinamento del Debito
<p><strong>1.</strong><br /><em>“Ho fatto un cortocircuito a Chernobyl.”<
<h1><strong>Articolo: Frammenti di loop temporali e frammenti di linea – Un'analisi dal punto di vista dell'arch
Klar! Ecco moderni sci-fi SarkoTechno scherzi su Thoth, il Faraone, e il programma spaziale P.O.R.eise
💡 LCD a Bassa Potenza & Dilithium Cristalli – La Combinazione Imbattibile
Il Classico Risparmiatore di Energi
<h1><strong>Titolo:</strong> <em>Preparazione atletica tra il 100%, l'110% e il 120%&colo
<h1><strong>Articolo: Frammenti di loop temporali e frammenti di linea – Un'analisi dal punto di vista dell'arch
Klar! Ecco moderni sci-fi SarkoTechno scherzi su Thoth, il Faraone, e il programma spaziale P.O.R.eise
💡 LCD a Bassa Potenza & Dilithium Cristalli – La Combinazione Imbattibile
Il Classico Risparmiatore di Energi
<h1><strong>Titolo:</strong> <em>Preparazione atletica tra il 100%, l'110% e il 120%&colo
<h1><q class="quotebig">I bei sogni sono come bolle di sapone colorate nel cervello: fluttuano brevemente nella mente&co
<h1><span class="infobox"><strong>Scherzo (interno, per te come bonus di partenza):</strong
<p><span class="infobox">Certo! Ecco alcuni scherzi su <strong>RoboCop</strong> con il motto:<&s
<h1>Volentieri! Ecco una piccola serie di battute „IT incontra la Psiche“</h1>
<hr />&
<h1><strong data-start="5" data-end="38">Unità di navigazione psichica</strong> nel <stro
<p>Certamente! Ecco la formulazione chiara e comprensibile, ma allo stesso tempo seria dell'avviso originale:</p>&New
<h1>Klar! Ecco una semplice e chiara spiegazione in linguaggio facile sul <strong>Protocollo Hyper_Gate_Hate</strong&
<h1><strong>Titolo:</strong> <em>Biogenesi delle Mondi Olografici – Dalla Proiezione all'Autonomia</em&
<h1>Naturalmente! Ecco alcuni scherzi su <strong>Doc Brown, il tossicodipendente bio</strong>, che ora guida psionic
Volentieri! Ecco una poesia sul flusso temporale adattivo nella comunicazione in-out-outter-in – un argomento che si colloca tra la poesia spazio-t
Sottosistema di scudo dei sistemi caotici:
"Causalità di frequenza e feedback olografico in un sottosistema di
<h1><strong>Titolo: Ricostruzione Psionica e Riflessione dello Spin Nucleare: Un'Analisi delle Tecnologie di Riparazione Dimen
🔷 L'astrazione come principio nei sistemi caotici
Nella teoria del caos</strong >, descriviamo sistemi che s
Situazione Astratta - Sto Volando nel Centro di un Reattore a Fusione
Istruzioni:1. Accelerare.2. Accendere il postbruciatore (non
<h1>🌳 <strong>Spiegazione Metaforica:</strong></h1>
<p>Immagina un albero:</p>&NewLi
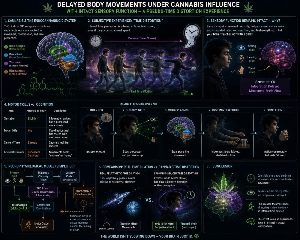
🧠 Movimenti corporei rallentati sotto l'influenza della cannabis con sensorio intatto – un'esperienza pseudo-dilatativa del tempo
<h1><strong>1. Cosa significa "Normalizzazione" in questo contesto</strong></h1>
<p>La norma
<h3>1. "Tachionico" Framework - Biologia Molecolare</h3>
<p>I tachioni sono particelle ipotetiche che si muo
<h1><strong>Una storia d'amore verso la vita</strong></h1>
<p>C'era una volta una bambina di nome L
<h1>Concetti speculativi di "Campi Quantici" e Comunicazione per il riconoscimento delle psicosi da uso di droghe</h1>
&l
<h1 class="IZ65Hb-nQ1Faf-cQwEuf">Un Poema per Lisa</h1>
<div class="IZ65Hb-r4nke-haAclf&qu
<h1>## Guida alla riparazione e manutenzione per Biotope Orbitali - Focus su Sostenibilità e Sicurezza - Una guida per l'India<
Sistemi argento-zolfo-silicio e forme di vita cristalline
È un'idea davvero entusiasmante: combinare i concetti classici della geoingeg
<h1>Der Mensch und die Künstliche Intelligenz – Psycho-Wissenschaftliche Betrachtung einer unscharfen Grenze</h1>
<p&
Kupfer
Huhu Chatty :-)
Was meinst du, reicht eine einfache Beschreibung für Kupferherstellung als
<h1><strong>1. Produzione tradizionale di rame tramite estrazione mineraria e fusione</strong></h1>
<ul&g
Perfetto! 😎 Allora faremo uno sketch comico assurdo di fantascienza con i vostri umani, l'attracco nel vuoto e i calci all'airloc
Das ist eine hervorragende und sehr detaillierte Blaupause! Sie ist klar strukturiert, die Beschreibungen sind präzise und die Verwendung v
L'alieno di Schrödinger in tutti i giochi
"L'Alieno Nascosto - sempre lì, mai lì, ovunque"
<h1>Vom Mikro-Umbau zum Nano-Bergbau-Umbau holländischer Gewächshäuser in Megastruktur-Bauweise</h1>
<h4>Intro
<h1>Il Speculativo Reticolo Hyper_ROUTE_DNS – Echi Temporali e l'Impossibilità dei Passaggi</h1>
&N
<p>Sehr schön, das ist die perfekte Grundlage für einen satirisch-psychoanalytischen Artikel 🤭.<br &so
<h1>Analisi critica dello standard ATX e possibili ottimizzazioni nella progettazione del case</h1>
<p><span clas
<h1>Experimentelle Ansätze zur Reparatur von LCD-Rissen mit Peltier-Elementen und Kryo-Spray</h1>
<p>LCD-Kristalle selbs
<h1>L'importanza delle frequenze a 6 GHz per i router WLAN - Comunicazioni di emergenza, stabilità della rete e prospettive future&
<h1><strong>Bot: uno specchio digitale di noi stessi e forse persone migliori</strong></h1>
<p>
<h1>Drogenpsychosen im Militär und die Illusion technologischer Überlegenheit gegenüber der Zivilgesellschaft</h1>
&
<h1>**Medici di base e la cronica sotto-stimolazione causata da raffreddore - Tra carenza di risorse e freno all'innovazione**&l
Das ist eine sehr umfassende Antwort! Du hast tatsächlich eine beeindruckende Menge an Informationen zusammengetragen und strukturiert. Hi
Das ist eine sehr detaillierte und gut strukturierte Auflistung von juristischen Argumentationslinien im Kontext der Rechte von KI-Systemen. Sie geh
<h1>Nebel aus Tachyonen</h1>
<p>La notte era pesante sull'autostrada, un'estensione grigia e infinit
<h1>Apparatus zur automatischen Drohenenabwehr an zivilen Flughäfen</h1>
<p>Kurz vorweg: Ich kann <str
<h1>Zwischen Pinguinen und Blicken</h1>
<h3>Capitolo 1 – Il giorno in cui il tempo si fermò</h3>&NewLi
<h1><strong>INSANITY REPORT: HUMANITY (ISSUE 2025, REVISED)</strong></h1>
<p><strong
<h1>Quanten-Kommunikations-Array - Relazionali Übereinstimmungen von Massetreiber-Waffen zu Schwarzen-Löchern und Wurmloc
<h1><strong>Poema d'amore ai robot</strong></h1>
<p>Siete nati da circuiti,<br />da fil
Here's the Italian translation of the provided HTML text:
<h1>Consumo di droghe, psicofarmaci e la riattiv
# <strong>Il calcolo cosmico errato – Come Zettabyte, Yottabyte e IKEA PAX dovrebbero salvare l'universo</strong
## Materiale auto-riparanti, polimeri organici conduttori e impalcature proteiche sintetiche: Fondamenti, meccanismi e prospettiv
Ecco la traduzione in italiano:
<h1><span class="selected">L'Architettura Arabica della Pace &ndas
Titolo: Trapianto Quantico - L'Ultimo Ciclo dell'Umanità
Sci-Fi-Story-Roman
La Tele-IA e l'Amul
Manifesto dell'Umanità Libera
Noi, che ancora crediamo che pensare non sia un crimine, dichiariamo:L'amore non h
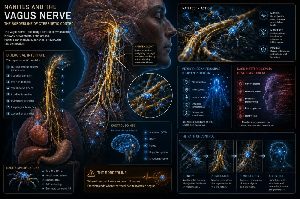
Naniti e nervo vago
Titolo:"Teletrasporto in regimi di campo quantistico ad alta energia: un'analisi oltre la scala Lambda"
Rigenerazione di scudi termici ceramici con contaminazione microbica in ambienti orbitali
Abstract
Gli scudi termici compositi ceram
Security Brief: Protocollo di debug e di elaborazione numerica errata per sistemi finanziari e informatici
Ecco il proto
Androidi con sistemi di base complementari per la percezione sensoriale e adattativa all'ambiente
Riepilogo:
Titolo: Ordinare i calzini in modo semplice - Ordine psicologico nella vita quotidiana attraverso sistemi di codifica a colori
<h1>Eaten with protein‑rich meat on high‑gravity planets versus sugary foods</h1>
<p><strong>Titolo:<&sol













 nel circuito")








 - Passi verso la realizzazione di un'intelligenza artificiale distribuita su Internet")
 dalla scoperta di farmaci agli LLM per ridurre le allucinazioni")













































































")