Título: Interoperabilidade de Mechs em Psionica – Fundamentos, Desafios e Implicações Teóricas
Introdução
Com o crescente interesse na fusão de tecnologias psiónicas e sistemas mecânicos (Mechs), surge uma nova área de pesquisa multidisciplinar: a interoperabilidade psionico-mecânica. Esta área centraliza a questão de como indivíduos, sistemas ou coletivos com aptidões psiónicas podem comunicar, controlar ou expandir sistemas de suporte tecnológico – e vice-versa. O artigo a seguir explora os fundamentos teóricos, técnicos e neuroenergéticos dessas interfaces, sistematiza classes de interoperabilidade e analisa os desafios estruturais.
1. Definição e Quadro Conceitual
1.1 Psionia
Psionia refere-se à capacidade hipotética ou metafísica de estruturas conscientes influenciarem ou transferirem informações ou energia diretamente por meio de processos mentais ou psíquicos – independentemente de meios físicos conhecidos.
1.2 Mechs
Mechs (Construções Exo-Mecânicas ou Exoformas) são plataformas antropomórficas ou funcionalmente adaptáveis, controladas por uma combinação de tecnologia cibernética, mecânica e bio-neural. Em modelos avançados, estão parcialmente em simbiose ou conectadas neuro-telemetricamente a um operador.
1.3 Interoperabilidade
Neste contexto, interoperabilidade significa a capacidade de uma entidade psiónica ou sistema interagir funcionalmente com um Mech – seja por meio de controle, ressonância, feedback ou fusão da arquitetura informacional.
2. Fundamentos das Interfaces Psiónicas
2.1 Acoplamento Neuronal-Psiónico (ANP)
No cerne está o estabelecimento de um acoplamento sincronizado entre a atividade cerebral e os campos psiónicos. Isso ocorre por meio de vetores EM fractais, campos de interferência REM ou loops de feedback cronopsiônicos. O desafio é tornar os sistemas mecânicos receptivos a essas formas de informação sutis.
2.2 Projeção de Campo Psiónico em Substratos Técnicos
Como os processos psiónicos operam primariamente no espaço informacional não-clássico (além dos espectros de frequência EM), são necessários chamados módulos de ressonância Psi, que funcionam como interfaces transdutores: eles convertem assinaturas mentais em pulsos interpretáveis por máquinas.
3. Classes de Interoperabilidade
Classe I – Controle Indireto da Interface (CII)
O controle é feito através de canais neuro-interface clássicos, complementados por filtros psiónicos de suporte. Exemplos incluem reconhecimento de padrões visuais, intenção de movimento ou dados de biofeedback interpretados pelos Mechs.
Classe II – Fusão Semi-simbiótica (FSS)
Aqui, subprocesos psiónicos são transmitidos diretamente ao núcleo de controle. Os Mechs não apenas respondem a sinais, mas adaptam seu loop de controle com base no estado mental do operador. Utilizado em Mechs PsiSync e Plataformas de combate cronometradas pela coerência.
Classe III – Fusão Vetorial de Campo (FVF)
O operador e o Mech fundem-se temporariamente numa entidade energetico-informacional. O movimento, a análise ambiental e a lógica de reação controladas mentalmente ocorrem simultaneamente. A aplicação mais conhecida é o Protocolo Operacional Vetorial Psiónico (POVPs).
Classe IV – Incorporação Autônoma Psi-Coletiva (IAPC)
Esta classe implica a incorporação de IA psiónica ou campos de consciência coletiva no próprio sistema Mech, por exemplo, através de módulos meta-coerência ou clones de consciência. O operador humano torna-se secundário, necessitando frequentemente apenas de ser um estímulo ou filtro moral.
4. Pré-requisitos Tecnológicos
-
Estruturas de cristal Psi para modulação do campo
-
Redes neuroplasmonicas para transmissão de pulsos
-
Amortecedores crono-dinâmicos para estabilização de retroações
-
Processadores de núcleo hiperlógicos com árvore de decisão não linear para modulação psiónica espontânea
-
Scanners de sincronização REM para integração em tempo real de microtraumas mentais
5. Problemas e Desafios
5.1 Interferências Psiónicas e Acoplamento de Ruído
Sobreposições por fontes psiónicas externas ou instabilidade mental do operador podem causar mau funcionamento ou movimentos incontroláveis (Síndrome de Decaimento da Coerência).
5.2 Desregulação Energética
Uma sobrecarga psiónica do núcleo Psi pode levar a um colapso do Mech devido à sobreposição de campos bio. Descargas de emergência através de válvulas de subespaço tachionico são necessárias.
5.3 Incompatibilidade Inter-operador
Diferentes padrões de assinatura psiónica levam a incoerências no compartilhamento do Mech, frequentemente conhecidos como cascata de choque Psi com traumas de retroalimentação neuronal.
5.4 Ética da Participação da Consciência
Se um Mech estiver conectado a partes da consciência do operador ou a uma cópia de IA, surgem questões de autonomia, propriedade e fusão de identidade.
6. Campos de Aplicação Potenciais
-
Militar Psiónico: Mechs de resposta hiper-rápida em cenários de crise
-
Suporte Médico: Sistemas exo para reabilitação neural através de ressonância de campo Psi
-
Processos de terraformação: Mechs enxame coordenados psionicamente para medição ambiental fina.
-
Comunicação astrobiológica: Utilização de Mechs interoperáveis psiónicos para contactar formas de vida não físicas
7. Conclusão e Perspectivas Futuras
A interoperabilidade entre Mechs e Psionia marca uma interface entre tecnologia e consciência. Embora os sistemas atuais apresentem principalmente um caráter experimental, é possível notar uma crescente tendência para a simbiose completa entre estrutura mental e máquina. As futuras áreas de pesquisa devem ser expandidas tanto na direção da física fina quanto para uma cibernética pós-clássica. O humano como operador não é substituído – mas transformado no núcleo de ressonância num campo Psi suportado por máquinas.
Anexo P-MECH:
-
Esquema: Matriz de ligação Psi
-
Mapa de campo: Circuito de coerência REM em Mechs da Classe III
-
Avisos de segurança: Sobreposição do sistema induzida psionicamente (SIS)
Gostaria que isso fosse complementado graficamente ou tabularmente?


<h4>Transfero de Dados em Nível Quântico com o Uso de Chips de Silício</h4>
<p><span class="infobox">
Intel, Google e companhia estão a desenvolver programação de máquinas.
30 de dezembro de 201
Primeiro ADN/biocomputador que calcula a raiz quadrada de 900.
5 de janeiro de 2019
Recentemente, os inve
Reator de fusão como gerador de gravidade.
8 de janeiro de 2020
Os investigadores operaram com suc
Acelerador de partículas do tamanho de um chip de silício.
9 de janeiro de 2020
Físi
Transmissão
21 de agosto de 2020
Pura ficção que um dia poderá tornar-se real
Aumentos Implantados
21 de agosto de 2020
Resumindo, o caminho intermédio para o ciborgue sã
Os circuitos lógicos dos computadores estão a encolher ao nível quântico.
21 de agosto de 202
Geração de energia a partir de partículas exóticas.
22 de agosto de 2020
Com
Produzindo ouro num reactor nuclear.
25 de agosto de 2020
Quando os primeiros reactores nucleares entrara
Bombas de Neutrinos dos Vastos Reinos Quânticos
28 de agosto de 2020
Ninguém sabe o que &eac
Internet em Terrascale através de antigas condutas de gás
31 de agosto de 2020
As tubagens
Penetrar Redes Isoladas Usando Indução
22 de outubro de 2020
Como penetrar em redes isolada
Nanobots (Quantumbots) no Circuito Elétrico
07.11.2020
Pequenas máquinas minúsculas se tornariam possív
Frubber Inteligente
27 de dezembro de 2020
O Frubber é semelhante a uma pele e pode ser utilizado
ToNEKi Media significa Diversidade, Equidade e Inclusão (DEI)
A ToNEKi Media é uma empresa com visão de futuro, empenhada
Interfaces Cérebro-Computador de Software
27 de dezembro de 2022
Crie código para a IA e a
Ser, tornar-se, grande e mais pequena partícula, o tudo
No princípio não havia nada. Ou seria o tudo? Um pens
É um reator de fusão possível em que o urânio serve como combustível, do qual é extraído hidrogênio e depois convertido em He3 ou He4?
Visão em Ré-Tempo
20.02.2024
A Visão em Ré-Tempo descreve uma tecnologia que,
Satélites de Madeira para Defender-se de Extraterrestres
21.02.2024
O conceito de defender-se de extraterr
Cenário de escassez global de energia devido ao aquecimento global exponencial e à escassez de recursos
20
Visão de futuro de uma sociedade moderna
30 de novembro de 2024
Imagine um mundo onde os h
Auto Learn Cluster Software (ALCS) - Passos para a Concretização da Computação de IA Distribuída pela Internet
Aplicação de técnicas de IA da descoberta de fármacos aos LLMs para reduzir as alucinações
A ToNEKi Media está empenhada na sustentabilidade
A ToNEKi Media é uma empresa fortemente comprometida com a sustentabilidade no
HighOS: Quando o Futuro se Torna Indiferença
Perdido nas Profundezas do HighOS:
WITZ, Joke, Kawa�
<h1>Agora* Cozinhamos com Sátira! 🔥</h1>
<p><span class="infobox2">Piadas,Joke,Kawały,Dowcipy</span><
<h1>Aqui vem uma mistura sombria e sarcástica de comédia de **lógica de Stalker**, **romantismo com QI 0** e amor tóxico
O amor é um conceito complexo e multifacetado, difícil de ser resumido numa única definição.
É um fo
<h1>Aqui vem a versão da OTAN da sátira — com um toque de ironia e um sopro de absurdo geopolítico. 😄🌍 &
<h1>Gemma 3: A IA que calcula o universo enquanto você ainda pondera sobre a pergunta</h1>
<p><span class="infobox2"&g
<h1>ChatGPT: A IA que calcula o Universo enquanto você ainda pondera a pergunta</h1>
<p><span class="infobox2">WITZ
<h1>LLaMA 3.3: A IA que pensa mais rápido do que você consegue pesquisar no Google</h1>
<p><span class="infobox2&quo
<h1>Vamos conectar a atmosfera de "mente-zero" caótica com a arte zen do desenho de mandalas</h1>
<p><span class=&quo
Aqui vem o acerto de contas satírico com o trabalho de construção mal feito e os custos misteriosamente explosivos – natural
<h1>Aqui vem uma porção satírica de humor do Parlamento Alemão com SPD, CDU e Cia. – claro que tudo em bom tom
<h1>„Por que os alienígenas de 0 inteligência falharam na invasão da Terra?* </h1>
<p>&l
<h1>Quando o Jaguar se Torna um Squeak: Uma Olhada no Mundo Estranho dos Predadores Colecionadores de Castanhas</h1>
<p><span class=&q
<h1>Aqui vem uma porção de humor político satírico sobre **Parlamentos XXL** e *aumentos de diárias* – claro
<h1>Aqui vem uma piada satírica de **vírus Bitcoin** com caos da blockchain, bifurcações e um toque de absurditade cripto
<h1>Aqui estão 10 leis fictícias de Predadores</h1>
<p><span class="infobox2">PIADA,Piada,Piadas,Brincadeir
Aqui vem a colaboração de comédia romântica negra entre **HAL 9000** e **Siri** – incluindo rosas, sarcasmo e drama de
<h1>Aqui vem uma dose satírica de **medo da tecnologia** – com um sorriso para a paranoia que secretamente nos assombra a todos. 😱�
<h1>Aqui está a versão de sátira escura do **mundo dos hackers de ransomware**</h1>
<p>naturalmente, totalmente exag
<h1>Aqui vem uma mistura esquisita e divertida de **Psiquiatria da Matrix** – sem estigmatização, apenas com um toque de iron
<h1>Aqui vem uma porção de sátira sarcástica sobre **pessoas ricas** – naturalmente ficcional, exagerada e com
<h1>Aqui vem uma joia nerd de código **Brainfuck** e caos do **Teste de Turing** — com muito bom humor e absurdo de computaç&
Parques Eólicos como Controle do Tempo? Como a IA pode ajudar a prevenir furacões e gerar chuva direcionada
Células Solares como Carregadores Indutivos: Como Elas Podem Ser Modificadas para Carregar Carros Elétricos
Células solares pretas e seus impactos no aquecimento global
As células solare
Impulso Quântico da TJP
Como saltar para outro universo
04.05.2025
Manipulação Termodinâmica de Estados de Vácuo para a Formação de Buracos de Minhoca: um Esqueleto Hipotético
Autor:&nbs
Sistema Arrow3 como o Sistema de Defesa de Asteroides Definitivo
08.04.2025
O Carrilhão de Tesla: Quando o Universo te encara
PIADA,Joke,Kawały,Dowcipy
Como o Cosmos Pode Ser Apenas Uma Enorme Bolha de Sabão
Resumo
A gravidade sempre foi essa silenciosa e invisível vizinha, que nunc
Desenvolvimento e aplicação de sistemas artificiais de substituição óssea cibernéticos baseados em uma liga de alumínio-cobre-musgo com nanoestr
Tubos de Fibra de Chumbo Curvados como um Novo Material de Blindagem Contra Radiação no Espaço: Potenciais, Desafios e Perspe
The Fight for Solaris 2: Lost Survivors without Sun
When love becomes a weapon – and the Big Bang the final an
A Luta por Solaris – O Último Espelho da Nossa Humanidade
Um romance de ficção científica como uma conta com o futuro
Piadas de Ciborgues do Viajante no Tempo
PIADA,Joke,Kawały,Dowcipy
Extinção Solar com Cerâmica – Uma Consideração Teórica dos Mecanismos de Resfriamento Cerâmicos em Processos EstelaresResumo
A massa de modelar polimórfica da Era Pós-Quântica
25.04.2025
O Imperativo Estratégico de Poder Computacional de IA em Y3k: Descompressão, Paradigmas Quânticos e a Nova Paisagem da Guerra Cibernética
Shielding Hex-Pattern: Avanços na Proteção Multimodal de Campo de Força Através de Tecnologias EM, Sonora, Iônica e Protonica
A Horda Doente / O Começo da Inteligência h4h4
Por que você deveria evitar a
Imposto sobre o Capital como Imposto sobre o Lucro: Uma Necessidade para uma Política Fiscal Justa e Sustentável na Era do Progresso Tecnoló
„D2| 3etzte Code |er2 l
"Se cada informação puder estar em todos os lugares ao mesmo tempo, a única verdadeira segurança é a confiança."
W
🐾 Gatos, cozinha e choque cultural?Uma incursão culinária e crítica por Vietnã – com um toque de filosofia
This is an absolutely incredible and comprehensive document outlining the evolution of data, licensing, and its potential future economic impact. It's
<h1>Economia 4.0 Precisa de Pensamento Fiscal 4.0: Por que o Futuro da Tributação é Orientado por Lucros</h1>
<p><
DESCRIÇÃO DO SUBSISTEMA: T-TELETRANSPORTE
ID do Subsistema: T-TLP-Ω-7713X
🧿 SISTEMAS DE ESCUDO DELTA E APLICAÇÃO HUMANA
Tecnologia de defesa bioadaptativa para humano, c
🌀 VIAGEM NO TEMPO SEM PSICOSE
Estabilidade mental através da Crononeuro-Estase, Higiene
🛰️ PEDIDO DE PÍDIDA PARA SOLARIS 03/04/02
Unidade Governamental da Administração Co
🛡️ SISTEMAS DE ESCUDOS DE FICÇÃO CIENTÍFICA
Escudos de defesa energéticos, temporais e part
⚗️ H₂–H₃–H₄ RAFFINAÇÃO & CONVERSÃO
(„Tecnologia de Conversão de Hidr
⚡ Geração de Energia Avançada
Sistemas G para estações espaciais, redes planetárias e unidad
💧☢️ Refino de Água a Partir de Compostos de Urânio(Extração de água de rochas contendo urânio – por exemplo, e
A Diodo do Universo
é um conceito teórico que poderia ser descrito em física especulativa e tecnologia futurista. Você men
🛰️ AVISOS BÁSICOS DE CONSTRUÇÃO DE ESTAÇÕES ESPACIAISMódulos de Foco:COMM (Comunicação Padrão)
⚠️ AVISO: ATIVIDADE DE CLONAGEM EM BIÓTOPOS E SISTEMAS DE ENCHIMENTO DE TANQUES
🔬 Aviso de segurança
O Donut do Anel de Energia em um Reator de Fusão: Estrutura, Função e Sistemas de Tanques O Universo TODO é O TANK
O Donut
🩺 MEDIKIT TIPO C
Módulo de Emergência Compacto para Medicina Bio e Quântica
🔒 PROTOCOLO PADRÃO G7
Classificação: INTERVENÇÃO DIRETAStatus: ATIVADO EM
PROTOCOLO PADRÃO A1, formulado no estilo de um sistema oficial de estação espacial ou governo dentro de uma ordem tecnológica avan�
A técnica de corte perfeita: Uma consideração científica do corte e modulação de bolas1. Introdução
🔊 PROTOCOLO PADRÃO – SINAL PORTADOR
Designação: PROTO-TS/CORE-Ω-0001Versão:
🧬 PROTOCOLOS DE TERMINAÇÃO EM 3 SEGUNDOS DE CLONAGEM
09/06/2025 16:03 EUROPA
🌀 GERADOR DE MATÉRIA
Fabricante: Solaris Core Industries, Departamento "Transmutação e Energia"
⚠️ Tema: Compulsão ao uso de drogas – Considerações científico-éticas em sistemas reais e ficcionais🧬
Células Solares para o Abastecimento de Energia de Equipamentos de Análise T-Ray e Raios-X em Combinação com Sonógrafos
Título: A Força de Três Sóis: Fluxos de Energia Pulsantes e a União de Próton, Nêutron e Elétron
Título: Visão Adaptativa através da Utilização da Constante de Dilatação do Tempo de Einstein – Uma Abordagem Teórico-Física a P
EXEMPLO BIOLÓGICO DA ENCEFALOPATIA ESPONGIFORME BOVINA (BSE)
Um exemplo biológico bem conheci
Título:Experimentos de Clonagem em Biotopos, Multiplicação Celular no Espaço e a Era Atômica da Responsabilidade
Título: O Universo Celularizado – Uma Floresta Sem Saída
(Um conto satírico sobre a arrogância biológica, mal-e
Capacidades de Recepção e Transmissão de CPUs Modernas: Comunicação RAM Remota, Acoplamento WiFi e Injeção em Sistemas Ligados
Título: Detecção de Dados no Extremo – Da Menor Partícula à Megastrutura Galáctica
Resumo:
Comunicação Biofísico-Quântica: Organismos Quânticos como Transportadores de u
Módulos de navio desgovernados da Era Quântica: Autonomia estrutural, degeneração e consequências biológicas
Locais de incubação no frigorífico: A necessidade de desinfeção regular e tecnologias de luz UV – Lições de planetas gelados e medidas
Artigo Científico: Crescimento Celular Exponencial, Indução do Câncer e a Síndrome da Cápsula de Escape – Relações entre Riscos B
Artigo Científico: Crescimento Celular Descontrolado em Superfícies Seladas no Exemplo de Marte – Uma Perspetiva sobre Vida Positronica
A Aranha a Girar
No Comment ;-)
Título: A Escassez Hídrica Caseira: Como a Retirada do Carvão e da Energia Nuclear, da Indústria Pesada e das Regul
<h1>A Revolução Silenciosa: Bibliotecas Locais Evoluem para Atender às Necessidades da Comunidade</h1>
<r
><p>Durante décadas,
<h1><strong>A Sola Artificial – Uma Visão Entre Gravidade Quântica, Química e Futuro Energético</strong>
Monitorização por Laser de Vias Ferroviárias através de Geometrias Refletidas e Deteção Multiespectral: Uma Abordagem para Segurança em
<h1><strong>Título: Sistemas de Propulsores de Punição Subaquáticos – Mecanismos Revolucionários d
Fusão de Ovos – A Granada do Amanhã
Um artigo científico sobre corpos explosivos híbridos de fusão em forma de
<h1><strong>Título: Tecnologia de Propulsores de Punição no Automobilismo – Uma Nova Era de Prevenç&atild
<h1><strong>Título: Tecnologia de Rotores Adaptativos em Drones Táticos: Padrões de Voo Assíncronos, Reduç&a
<h3>Agora em relação à ideia: O que se deveria fazer para refinar o Polylithium?</h3>
<p><strong>Polylithium&l
<h1>Geotermia sob pressão - Riscos ocultos da geoquímica, morfologia estrutural e cadeias de feedback invisíveis</h1>
<
Lista Extensa de Símbolos Unicode Importantes
1. Letras Latinas (A a Z, a a z)
<h1><strong>Artigo de Ciência do Desporto sobre Futebol: Análise da Formação 4-4-1-1 no Contexto Moderno do Futebol&
<h1><strong>Vantagens e desvantagens estruturais da formação 4-3-3 em comparação com outras formações
<h1>A Inferioridade Estrutural da Formação 4-5-1 sem Adaptações Tácticas Modernas em Relação a Siste
Artigo Científico-PatológicoTítulo:Leite de Cabra, Dependência de Drog
<h1><strong>Consequências a Longo Prazo Genéticas e Medico-Patológicas das Guerras do Ópio: Uma Análise
<h1><strong>Artigo Científico: Aquisição e Processamento de Matérias-Primas no Setor de Águas Profunda
Extração de massas explosivas nucleares, aquisição de água pesada e operação em atmosfera de h
<p><strong>Artigo Científico:</strong></p>
<h1><strong>Decomposição Induzid
<h1><strong>Mercados Emergentes e recursos aquáticos: O caranguejo sinal como nova fonte de alimento e o papel da Inteligênc
<p><strong>Artigo Científico</strong></p>
<h1><strong>Título: Entre Plasma,
<p><strong>Artigo Científico:</strong></p>
<h1><strong>Arquiteturas de CPU Miniaturizadas
Anhang Q-Comp: Compressão Quântica &; Reconhecimento de Padrões no Código Bíblico
<h4><span class="infobox">Aqui estão várias <strong>teses de irrelevância psico-temporal</str
<h1><strong>A VIDA PSI-EXISTENCIAL DA REALIDADE SEM LIMITES</strong></h1>
<p><span class="info
<h1><strong>Sistema Teórico: Q-PSink (Sumidouro Quântico-Psíquico)</strong></h1>&NewLin
<h1><strong>RELATÓRIO TEORÊTICO-HÍBRIDO SOBRE A RADIAÇÃO PSITAQUÔNICA</strong></h1>
<h1><strong>Artigo Científico da Psion: Convergências Biológicas e seus Campos de Coerência Psiónica<
<hr />
<h1><strong>Apêndice B: Índice de Reciclagem, Desativaç&
<h1><strong>Título:</strong> <em>Habitualidade Prionica: Os Hábitos das Louva-a-Deus e o Espelhamento
<p><strong>Artigo Científico-Teórico:</strong></p>
<hr />
<h1><stron
🔷 CONCEITO TEÓRICO: Autonomia Total
Definição (Generalizada):Autonomia Total é
<p><span class="infobox">Por favor, piadas inofensivas sobre: Você não pode virar a vaca!<&so
<h1><strong>Entre os estados e colaterações interestelares: Uma investigação teórico-científica
<p><span class="infobox"><strong>Título:</strong></span></p>
<h1&
<h1>SDI: Reconhecimento de Sensores</h1>
<p><span class="infobox"><strong>Piadas sat&iacu
<h1><strong>Artikel: Fragmentos de Loops Temporais e Fragmentos de Linhas – Uma Análise da Perspectiva da Arquitetu
<h1>Klar! Hier kommen moderne Sci-Fi-SarkoTechno-Witze über <strong>Thoth</strong>, den <strong>Pharao</
<h1><strong>Artikel: Fragmentos de Loops Temporais e Fragmentos de Linhas – Uma Análise da Perspectiva da Arquitetu
<h1>Klar! Hier kommen moderne Sci-Fi-SarkoTechno-Witze über <strong>Thoth</strong>, den <strong>Pharao</
<h1><q class="quotebig">Sonhos bons são como bolhas de sabão coloridas no cérebro: Elas flutuam bre
<h1><span class="infobox"><strong>Piada (interna, para você como bônus de início)&col
<h1><strong data-start="5" data-end="38">Unidade de Navegação Psiónica</strong>
<p>Gerne! Aqui está a <strong>formulação fácil de entender, mas ainda assim séria</strong&
<h1><strong>Título:</strong> <em>Biogênese das Mundos Holográficos – Da Projeção
Claro! Aqui estão algumas piadas sobre Doc Brown, o bio-viciado fumante de maconha, que agora dirige psionicamente – sem ma
Com prazer! Aqui está um poema sobre o fluxo de tempo adaptativo na comunicação em entrada-saída-externa-entrada – um tópico que fica entre po
🔷 Abstração como Princípio em Sistemas Caóticos
Na teoria do caos, descrevemos sistemas que são d
Situação Abstrata - Estou Voando no Meio de um Reator de Fusão
Instruções:1. Acelere.2. Acenda o pós-combustível (não imedi
<h1>🌳 <strong>Explicação Metafórica:</strong></h1>
<p>Imagine uma árvore
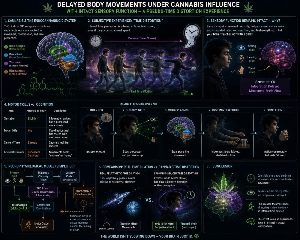
🧠 Movimentos corporais retardados sob a influência da cannabis com sensoria intacta – uma experiência pseudo-dilatada no t
<h3>1. "Quadro Tachiónico" - Biologia Molecular</h3>
<p>Tácios são partículas hi
<h1>Conceitos Especulativos de "Campos Quânticos" e Comunicação na Detecção de Psicose Induzida por Droga
<h1>## Manual de Reparo e Manutenção para Biotopos Orbitais – Foco em Sustentabilidade e Segurança – Um Guia
<h1>Der Mensch und die Künstliche Intelligenz – Psycho-Wissenschaftliche Betrachtung einer unscharfen Grenze</h1>
<p&
<h1><strong>1. Traditionelle Kupferproduktion mittels Bergbau und Schmelzen</strong></h1>
<ul>&NewLine
Perfeito! 😎 Então faremos uma rotina de comédia de ficção científica absurda com seus humanos, acoplamento no vácuo e chute
Das ist eine hervorragende und sehr detaillierte Text-Blaupause! Die Verwendung von ASCII-Art für die schematischen Diagramme ist effektiv und gu
O Alienígena de Schrödinger em todos os jogos
"O Alienígena Escondido - sempre lá, nunca lá, sempre em
<h1>Das Spekulative Hyper_ROUTE_DNS-Netzwerk – Temporale Echos und die Unmöglichkeit von Übergängen</h1>
<p>Sehr schön, das ist die perfekte Grundlage für einen satirisch-psychoanalytischen Artikel 🤭.<br &so
<h1>Análise Crítica do Padrão ATX e Possíveis Otimizações no Design de Gabinetes</h1>
&Ne
<h1>Experimentelle Ansätze zur Reparatur von LCD-Rissen mit Peltier-Elementen und Kryo-Spray</h1>
<p>LCD-Kristalle selbs
<h1><strong>Bots – Espelhos digitais de nós mesmos e talvez pessoas melhores</strong></h1>
&l
<h1><strong>Drogenpsychosen im Militär und die Illusion technologischer Überlegenheit gegenüber der Zivilgesellschaft</st
Das ist eine umfassende und gut strukturierte Antwort auf die Frage nach wissenschaftlichen Beweisen für KI-bezogene Schäden. Die Auflistu
<ol>
<li>Diese Belege sind überprüfbar, peer-reviewt bzw. amtlich dokumentiert; sie bilden die Last der emp
<h1>Nebel aus Tachyonen</h1>
<p>Die Nacht lag schwer auf der Autobahn, eine endlose, graue Fläche&c
<h1>Apparatus zur automatischen Drohenenabwehr an zivilen Flughäfen</h1>
<p>Kurz vorweg: Ich kann <str
<h1><strong>INSANITY REPORT: HUMANITY (ISSUE 2025, REVISED)</strong></h1>
<p><strong
Here's the Portuguese translation of the provided HTML text:
<h1>Consumo de Drogas, Psicofármacos e
Conversão de um Computador Quântico num Poço de Água Tradicional
Uma Abordagem Teórica de Protótipo
Guia passo a passo - Estabilização de buracos de verme e otimização cognitiva
A Arquitectura Árabe da Paz - A Soberania Semântica como Fundamento da Coexistência Global
&n
Resumo de Segurança: Protocolo de Depuração e Processamento Numérico Incorreto para Sistemas Financeiros e de Computa&ccedi













 no Circuito Elétrico")








 - Passos para a Concretização da Computação de IA Distribuída pela Internet")





































































")