כותרת: יכולת פעולה הדדית של מכונות בשימוש בפסיאונטיקה – יסודות, אתגרים והשלכות תיאורטיות
מבוא
עם העניין הגובר בשילוב טכנולוגיות פסיאונטיות ומערכות מכניות (מכונות), נוצר תחום מחקר רב-תחומי חדש: יכולת פעולה הדדית פסיאונטית-מכנית.הדגש כאן הוא על השאלה כיצד יצורים, מערכות או קולקטיבים בעלי יכולות פסיאונטיות יכולים לתקשר עם מערכות נשיאה טכנולוגיות, לשלוט בהן או להרחיב אותן - ולהיפך. מאמר זה בוחן את היסודות התיאורטיים, הטכניים והנוירו-אנרגטיים של ממשקים אלה, ממיין רמות יכולת פעולה הדדית ומנתח את האתגרים המבניים.
1. הגדרה ומסגרת מושגים
1.1 פסיאונטיקה
פסיאונטיקה מתייחסת ליכולת היפותטית או מטפיזית של מבני תודעה להשפיע על מידע או אנרגיה ישירות באמצעות תהליכים מנטליים או פסיכיים - ללא קשר לאמצעים פיזיקליים ידועים.
1.2 מכונות
מכונות (מערכות אקסו-בנייה מכניות או אקסופורמות) הן פלטפורמות אנתרומורפיות או מותאמות תפקודית, אשר נשלטות על ידי שילוב של טכנולוגיה קיברנטית, מכנית ונוירו-ביולוגית. בדגמים מתקדמים יותר, הן משולבות באופן סימביוטי או נוירו-טלומטרי עם מפעיל.
1.3 יכולת פעולה הדדית
בהקשר זה, יכולת פעולה הדדית פירושה היכולת של ישות או מערכת פסיאונטית לקיים אינטראקציה עם מכונה ברמה תפקודית - בין אם באמצעות שליטה, תהודה, משוב או מיזוג ארכיטקטורת המידע.
2. יסודות של ממשקים פסיאונטיים
2.1 צימוד נוירו-פסיאונטי (NPK)
במקום הלב, נמצאת הקמת צימוד מסונכרן בין פעילות מוחית ושדות פסיאונטיים. זה קורה באמצעות וקטורי EM מקוטעים, שדות התערבות REM או לולאות משוב כרונופסיכוניות. האתגר הוא להפוך מערכות מכניות לרגישות לצורות מידע עדינות אלה.
2.2 הקרנת שדה פסיאונטי לתוך תת-מערכות טכנולוגיות
מאחר שתהליכים פסיאונטיים פועלים בעיקר במרחב המידע הלא-קלאסי (מעבר לספקטרום התדרים של EM), נדרשים מודולי תגובה ψ, אשר משמשים כממשקים תרגום: אלה ממירים חתימות מנטליות לזרמי אות שניתן לפרש על ידי מכונה.
3. רמות יכולת פעולה הדדית
רמה I - שליטה עקיפה בממשק (IIS)
השליטה מתבצעת באמצעות ערוצי ממשק נוירו-קלאסיים, בשילוב עם מסננים פסיאונטיים תומכים. דוגמאות כוללות זיהוי דפוסי ויזואליים, כוונות תנועה או נתוני ביופידבק המפורשים על ידי מכונות.
רמה II - מיזוג סימביוטי חלקי (SSF)
כאן, תהליכים פסיאונטיים משניים מועברים ישירות לגרעין השליטה. מכונות לא רק מגיבות לאותות, אלא גם מתאימות את מעגל הבקרה שלהן על סמך מצבו המנטלי של האופרטור. בשימוש במכוני PsiSync ו- פלטפורמות קרב מסונכרנות.
רמה III - מיזוג שדה וקטורי (VFV)
האופרטור והמכונה מתמזגים באופן זמני לישות אנרגטית-מידע. תנועה מבוססת מחשבה, ניתוח סביבה ולוגיקת תגובה מתרחשים בו זמנית. היישום המוכר ביותר הוא פרוטוקול פעולה וקטורית פסיאונטית (PVOP).
רמה IV - שילוב אוטונומי בקולקטיב Psi (APK)
רמה זו מרמזת על שילוב בינה מלאכותית פסיאונטית או שדות תודעה קולקטיביים במערכת המכונה עצמה, לדוגמה באמצעות מודולים של תהודה מטא או שכפלי תודעה. האופרטור האנושי הופך לשניוני, לעתים קרובות זקוק רק כזרז או מסנן מוסרי.
4. דרישות טכנולוגיות
-
מבני גביש ψ לשינוי שדה
-
רשתות נוירו-פלסמוניות להעברת אותות
-
מאגרי זמן-דינמיים לייצוב משוב
-
מעבדים ליבה של היפר-לוגיקה עם עץ החלטה לא ליניארית לשינוי פסיאונטי ספונטני
-
סורקי סינכרון של פעימות שינה (REM) לשילוב מיקרו-טראומות מנטליות בזמן אמת
5. בעיות ואתגרים
5.1 הפרעות פסיאונטיות ותיעוד רעש
חפיפה ממקורות פסיאונטיים חיצוניים או חוסר יציבות מנטלית של האופרטור יכולה לגרום לתקלות או לתנועות בלתי נשלטות (תסמונת התפרקות תהודה).
5.2 הפרעה אנרגטית
עומס פסיאונטי על ליבת ה-Ψ יכול להוביל לקריסת מכונה עקב חפיפה של שדה ביו. יש צורך בשחרורים חירום באמצעות שסתומי תת-מרחב טכיאוניים.
5.3 אי-תאימות בין מפעילים
דפוסי חתימת פסיאונטיות שונים מובילים לאי-הרמוניה בשיתוף מכונות, הידוע בדרך כלל כשרשרת תגובה של זעזועים Psi עם טראומות משוב נוירלי.
5.4 אתיקה של השתתפות בתודעה
אם מכונה מחוברת לחלקים מהתודעה של האופרטור או לשכפול AI, עולות שאלות לגבי אוטונומיה, בעלות וערפול זהות.
6. תחומים פוטנציאליים ליישום
-
צבא פסיאונטי: מכונות תגובה מהירה במיוחד בתרחישי חירום
-
תמיכה רפואית: מערכות אקסו לתהליך שיקום נוירוני באמצעות תהודה של שדה Ψ
-
תהליכי עיצוב מחדש של כדור הארץ: מכונות נחילים המאורגנות פסיאונטית למדידת סביבה עדינה
-
תקשורת אסטרו-ביולוגית: שימוש במכונות אינטר-פסיאונטיות ליצירת קשר עם צורות חיים לא פיזיות
7. סיכום ותחזית
יכולת הפעולה ההדדית בין מכונות לפסיאונטיקה מסמנת נקודת מפגש בין טכנולוגיה לתודעה. בעוד שמערכות היום נושאות בעיקר אופי ניסיוני, ניתן לראות מגמה גוברת של סימביוזה מלאה בין מבנה מנטלי ומכונה. תחומים עתידיים למחקר צריכים להיות מורחבים הן לכיוון פיזיקה עדינה והן לפעילויות קיברנטיקה פוסט-קלאסית. האדם כאופרטור לא יוחלף - אלא יהפוך לליבת תהודה בשדה Psi נתמך על ידי מכונה.
נספח P-MECH:
האם תרצה להשלים זאת באופן גרפי או טבלאי?


העברת נתונים ברמה הקוונטית באמצעות שבבי סיליקון.
28 בדצמבר, 2019
אינטל, גוגל ושות' מפתחות תכנות מכונה.
30 בדצמבר, 2019
מפתחים ב�
מחשב DNA/ביו ראשון שמחשב את השורש הריבועי של 900.
5 בינואר, 2019
�
כור היתוך כמחולל כבידה.
8 בינואר, 2020
חוקרים הפעילו בהצלחה כ
מאיץ חלקיקים בגודל של שבב סיליקון.
9 בינואר, 2020
פיזיקאים בא
הקרנה
21.08.2020
פִיקְשֶׁן טָהוֹר שֶׁיּוּכַל לִהְיוֹת מְצִיאו�
הרחבות מושתלות
21 באוגוסט, 2020
בקיצור, דרך הביניים לסייבורג
מעגלי לוגיקה של מחשבים הולכים ומצטמצמים ברמה הקוונטית.
21 באוגוסט,
יצירת אנרגיה מחלקיקים אקזוטיים.
22 באוגוסט, 2020
בעזרת ממצאי�
ייצור זהב בכור גרעיני.
25 באוגוסט, 2020
כאשר הכורים הגרעיניים
פצצות נייטרינו מעולמות הקוונטים העצומים
28 באוגוסט, 2020
אף �
אינטרנט טרסאלי דרך קווי גז ישנים
31 באוגוסט, 2020
קווי גז או ג
חדירה לרשתות מבודדות באמצעות אינדוקציה
22 באוקטובר, 2020
כיצ
ננו-רובוטים (קוונטובוטים) במעגל חשמלי
07.11.2020
מכונות קטנות ו�
פרובר אינטליגנטי
27 בדצמבר, 2020
פרובר הוא דמוי עור וניתן להש
Ang ToNEKi Media ay nangangahulugang Diversity, Equity, and Inclusion (DEI)
Ang ToNEKi Media ay isang forward-thinking company na nakatuon sa
ממשקי תוכנה למחשב מוחיים
27 בדצמבר, 2022
צור קוד עבור בינה מל�
להיות, להתהוות, חלקיק גדול וקטן ביותר, הכל
בראשית לא היה כלום.או שמא זה היה ה
האם מגיב FUSION אפשרי כאשר אורניום משמש כדלק, ממנו מחלצים מימן ואז הופכים אותו ל- He3 או H
Time-Reverse-Sight
20.02.2024
ה-Time Reverse Sight מתאר טכנולוגיה המאפשרת באמצע
לווייני עץ להגנה מפני חייזרים21.02.2024הקונספט להגנה מפני חייז
תרחיש של מחסור באנרגיה עולמי עקב התחממות כדור הארץ האקספוננציאלית ומחסור במשאבים
חזון עתידי של חברה מודרנית
30 בנובמבר, 2024
דמיינו עולם ש
תוכנת אשכול למידה אוטומטית (ALCS) - צעדים לקראת מימוש מחשוב בינה מלאכותית מבוזר דרך הא
יישום טכניקות בינה מלאכותית מגילוי תרופות ועד לתואר שני במשפטים להפחתת הזיות
ToNEKi Media מחויבת לקיימות
ToNEKi Media היא חברה המחויבת מאוד לקיימות במגזרי האירוח והק�
HighOS: כאשר העתיד הופך לאדישות
אבודים במעמקי HighOS:
WITZ, Joke, Kawał
<h1>עכשיו* נבשל עם סאטירה! 🔥</h1>
<p><span class="infobox2">צחוק, בדיחה, קוואלי, דו�
<h1>הנה שילוב מעורר השראה של קומדיה אפלה-סרקסטית מתוך **לוגיקת סטוקר**, **רומנטיקה ב-IQ
אהבה היא מושג מורכב ורב-גוני שקשה ללכוד אותו בהגדרה אחת.
זוהי תחושה חזקה של חיב
<h1>הנה הגרסה של נאט"ו ללוּעֲז – עם מבט משועשע ונגיעה של אבסורד גיאופוליטי. �
<h1>ג'מה 3: הבינה המלאכותית שמחשבת את היקום בזמן שאתה עדיין תוהה על השאלה</h1>
<p
<h1>ChatGPT: ה-AI שמחשב את היקום בזמן שאתה עדיין תוהה על השאלה</h1>
<p><span class="infobox2
<h1>LLaMA 3.3: ה-AI שחושב מהר יותר מחיפוש בגוגל</h1>
<p><span class="infobox2">בדיחה,Joke,Ka
<h1>נתחבר לאווירה של "אינטליגנציה אפסית" כאוטית עם אמנות הזן של ציור מנדלה</h1&
כאן מגיע החשבון הסאטירי עם עבודות הבנייה הכושלות והעלויות המתפוצצות באופן מסתורי -
<h1>הנה מנה סאטירית של הומור מהבונדסטאג עם המפלגות SPD, CDU ועוד - כמובן לגמרי בפורמט הב
<h1>„למה חייזרים עם מנת משכל אפס נכשלו בפלישה לכדור הארץ?* </h1>
<p&g
<h1>אם יագואר הופך לכרגל: הצצה לעולם המוזר של טורפים אוכלי זנים</h1>
<p><span class=&q
<h1>הנה מנה של הומור פוליטי סאטירי על **פרלמנטים ענקיים** ו*העלאות תלוש הוצאות* - כמוב�
<h1>הנה בדיחה סאטירית על **וירוס ביטקוין** עם כאוס בלוקצ'יין, פיצולים והילה של אבסו
<h1>הנה 10 חוקים בדיוניים של ציידים</h1>
<p><span class="infobox2">בדיחה, בדיחה, בדי
הנה מגיע שיתוף הפעולה הקומי הרומנטי האפל בין **HAL 9000** ל-**Siri** - הכולל ורדים, סרקזם ודרמ
<h1>הנה מנה סאטירית של **חרדת טכנולוגיה** – עם מבט חולף על הפרודיה שמס�
<h1>הנה הגרסה הסאטירית האפלה של **עולם האקרים כופרים**</h1>
<p>כמובן, לגמרי מוגזם �
<h1>הנה משהו קליל ומעורר מחשבה - תערובת של פסיכיאטריה מטריקסית, ללא סטיגמציה, רק עם מ
<h1>הנה מנה של סאטירה עוקצנית על **אנשים עשירים** - כמובן, לגמרי בדיונית, מוגזמת ובאהב�
<h1>הנה מציאת גאון מתוך **קוד בריינפק** ו**כאוס מבחן טורינג** – עם הרבה הומור ואבס�
טורבינות רוח כשליטה במזג האוויר? כיצד בינה מלאכותית יכולה
תאים סולאריים כמטענים השראתיים: כיצד ניתן להמיר אותם למטעני רכב חשמלי
תאים סולאריים שחורים והשפעתם על התחממות כדור הארץ
הנעת קפיצה של TJP
כיצד לקפוץ ליקום אחר
מניפולציה תרמודינמית של מצבי ואקום ליצירת חור תולעת: מסגרת היפותטית
מחבר:
Arrow3-System כאמצעי הגנה אולטימטיבי מפני מטאורים08.04.2025
הארגז מנגינות של טסלה: כשכוכב המזל בוהה בך
צחוק, בדיחה, קאווָאלִי
האם היקום הוא בעצם בועת סבון ענקית?
תקציר
כוח הכבידה היה תמיד השכן השקט וה�
התפתחות ויישום של עצמות מלאכותיות מבוססות סגסוגת אלומיניום-נחושת-טחב עם מבני ננו-נ
צינוריות ננו סיבי עופרת מעוקמות כהגנה מפני קרינה חדשנית בחלל: פוטנציא�
The Fight for Solaris 2: Lost Survivors without Sun
When Love Becomes a Weapon – and the Big Bang the Last Answer
המאבק על סולאריס – המראה האחרון של האנושות
רומן מדע בדיוני כחשבון
בדיחות סייבורג של נוסע בזמן
צחוק, בדיחה, קוו
השמדת השמש באמצעות קרמיקה – התבוננות תיאורטית במנגנוני קירור קרמיים בתהליכים סטי�
האימפרטיב האסטרטגי של כוח מחשוב בינה מלאכותית ב-Y3k: דקומפרסיה, פרדיגמות קוונטי�
מגן תבנית הקסגון: התקדמות במגן רב-תחומי באמצעות טכנולוגיות EM, קול, יונים ופרוטו
העדר החולה / תחילת האינטליגנציה h4h4
למה כדאי
מס הכניסה כתשלומי רווח: צורך למדיניות מס הוגנת ומוכנה לעתיד בעידן ההתקדמות הטכ
„D2| 3דקוד אחרון |ר
"כשכל מידע יכול להיות בכל מקום בו זמנית, האבטחה האמיתית היחידה היא אמון."
🐾 חתולים, מטבח והלם תרבותי?סקירה קולינרית-ביקורתית של וייטנאם – עם נג�
<h1>כלכלה 5.0 – כשנתונים הופכים למטבע העתיד</h1>
<p><span class="infobox">07.06.2025&
<h1>כלכלה 4.0 דורשת מיסוי 4.0: מדוע העתיד של מיסוי הוא מונחה רווח</h1>
<p><span class="
Medikit TYPE P
🧠 תיאור: סינתיסייזר ננו-לב עם מבנה קשור כימי על אלקטרופולס-מוליך-פ�
Medikit TYPE P
18. סימולטור איברים המבוסס על קשרי שדה מבניים פועמים עם שינוי חומר
תיאור תת-מערכת: T-טלפורט
מזהה תת-מערכת: T-TLP-Ω-7713X
🌀 מסעות בזמן ללא פסיכוזה
יציבות נפשית באמצעות כרונו-
🛰️ בקשה למחקר ופיתוח עבור SOLARIS 03/04/02
יחידת ממשל של ני�
🛡️ מערכות מיגון מדע בדיוני
<p> </p>
<hr />
<h1>⚛️ <strong >ניקוי והמרת H₂–H₃–H₄<
⚡ YITZUR ENERGIYA HAHADASH
Mizuggot Generation-G le-machatzavim shel tachanot machol, resheiot keh
💧☢️ מיצוי מים מתרכובות אורניום(חילוץ מים מסלע המכיל אורניום – לדו�
המַנֶטֶר הָאוֹנִיבֶרְסָלִי
הוא מושג תיאורטי שניתן לתאר אותו בפיזיקה
🛰️ הנחיות אזהרה בסיסיות לבניית תחנת חלל
מודולי מיקוד:
COMM (
⚠️ אזהרה: פעילות שכפול בסביבות ובמערכות מילוי טנקים🔬 הערת �
הטבעת אנרגיה-דונאט בכור היתוך: מבנה, תפקוד ומערכות טנק. כל היקום הוא הטנק
🩺 מדיקייט מסוג C
מודול חירום קומפקטי לרפואה ביולוגית ו
🔒 STANDARDPROTOCOL G7
קלאסיפיקציה: פרוטוקול התערבות ממוקד�
פרוטוקול סטנדרטי A1, שנוסח בסגנון של תחנת חלל רשמית או מערכת ממשלתית בתוך ס�
הטכניקה המושלמת לחיתוך: בחינה מדעית של חיתוך ושינוי כדורים1. מבו�
🔊 פרוטוקול סטנדרטי – אות נשא (Carrier Signal)
שם: PROT
🧬 פרוטוקולי סיום 3 שניות לשכפול
09.06.2025 16:03 אירופה
🌀 מחולל חומר
⚠️ הנושא: הכפייה לצרוך סמים - בחינה מדעית-אטית במערכות אמיתיות ובדיוניות
כותרת: כוחם של שלושה שמשות: זרמי אנרגיה פועמים ואיחוד פרוטון, נויטרון ואלקטרון
Titel: Adaptive Sicht durch die Nutzung der einsteinschen Zeitdilatations-Konstante – Eine theoretisch-physikalische Annäherung an d
דוגמה ביולוגית של מחלת פרה משותקת (BSE)
דוגמה ביולוגית י
כותרת:ניסויי שיבוט בביוטופים, שכפול תאים בחלל ועידן האטום של אחרי�
BSE (מחלת שפיית כבשים)
להלן ניסיונות או גישות בעייתיות ב
כותרת: היקום הצומח – יער ללא מוצא
(סיפור קצר סאטירי על יהירות ביו�
יכולות קבלה ושליחה של מעבדים מודרניים: תקשורת RAM מרחוק, צימוד WiFi והזרקה למערכות
כותרת: גילוי קוונטים בקצה הקיצוני – מהחלקיק הקטן ביותר ועד למגה-מבנה הגלקטי
תקשורת קוונטית-ביולוגית: אורגניזמים קוונטיים כנ�
מודולי ספינות מוטעים של עידן הקוונטים: אוטונומיה מבנית, התדרדרות והשלכות ביול�
מערכות גידול במקרר: הצורך חיטוי קבוע וטכנולוגיות אור UV – לקחים מירחי קרח ואמצע
מאמר מדעי: צמיחה תאית אקספוננציאלית, גרימת סרטן ותסמונת תא ההמלטה – קשרים בי
מאמר מדעי: צמיחה בלתי מבוקרת של תאים על משטחים אטומים בדוגמה של מאדים - מבט אל ח�
העכביש הסורג
No Comment ;-)
כותרת: מחסור במים תוצרת בית: כיצד נסיגת ייצור הפחם והאנרגיה הגרעינית, התעשייה ה
<h1>המהפכה השקטה: ספריות מקומיות מתפתחות כדי לענות על צורכי הקהילה</h1>
<p> במשך
ניטור רכבות מבוסס לייזר באמצעות גיאומטריות מחזירוֹן וזיהוי רב-ספקטרלי: גישה ל�
<h1><strong>Titel: מערכות מאיצי ענישה מתחת למים – מנגנוני התחמקות, ציד ותגובה מהפכ
ביצי היתוך – רימון היד של המחר
מאמר מדעי על מטעני נפץ היברידיים �
<h1><strong>כותרת: טכנולוגיית מדחף עונשין בתעשיית הרכב – עידן חדש של מניעת התנג
<h1><strong>כותרת: טכנולוגיית מדחף עונשין אדפטיבית בכלי טיס קרביים טקטיים: דפוסי טי�
Ökonomische Leistungsfähigkeit durch Mindestlohn, Transfermechanismen und wohngeldinduzierte Konsumimpulse in modernen Wirtschaftssys
<h3>הנה התרגום של הטקסט לעברית, תוך שמירה על קוד ה-HTML ככל האפשר:</h3>
<h3/> כעת ל
<h1>גאותרמיה תחת לחץ – סיכונים נסתרים מגיאוכימיה, מבנה סְטרוּקטורי ומערכות משוב
רשימה מקיפה של תווים Unicode חשובים
1. אותיות לטיניות (A–Z, a–z)
מאמר פתולוגי-מדעניכותרת:חלב עיזים, תלות בסמים ודִגְנ�
<h1><strong>גנטיות והשלכות רפואיות-פתולוגיות ארוכות טווח של מלחמות האופיום: נית�
<h1><strong>מאמר מדעי: כריית ועיבוד משאבים במגזר הים העמוק והאנרגיה: אסטרטגיו
<p><strong>מאמר מדעי:</strong></p>
<h1><strong>פירוק הנגרם על ידי לית�
<p><strong>מאמר מדעי</strong></p>
<h1><strong>כותרת: בין פלזמה, Pollu
כותרת:חתולים משוטטים, זירות אימונים עירוניות ותיאוריית הפדרליזם �
מאמר טרום-פוסט מדעי
כותרת: קורלציות בין בקרת משיכה, מסילות
<p><strong>מאמר מדעי:</strong></p>
<h1><strong>ארכיטקטורות מעבדים זע�
Anhang Q-Comp: דחיסת קוונטים &; זיהוי תבניות של קוד התנ"ך
דו�
<h4><span class="infobox">להלן מספר <strong>תזות של חוסר הרלוונטיות הפסיכו-זמנית&
<h1>🌀 <strong>לחיצת יד פסי-טכיוןית ברמה קוונטית</strong></h1>
<p><span clas
<h1><strong>DIE PSI-LEBEWESEN DER ENTGRENZTEN REALITÄT</strong></h1>
<p><span class="info
תַּקְצִית ג: פלזמה קריוגנית במערכות מחשוב חיוביטרונים
מטרה:
<h1><strong>מערכת תיאורטית: Q-PSink (כיור קוונטי-פסיכוטרוני)</strong></h1>
<h1>🛰️ <strong>1. הקשר: כוחות אוטונומיים במורכב הצבאי-פרה-צבאי</strong><&so
<p>הנה מדריך / תרשים טכני <strong>תיאורטי להנדסה</strong> לבניית <strong>מנגנוני
<h1><strong>HYBRID-THEORETISCHER PSYTACHYONISCHER VERSTRAHLUNGSBERICHT</strong></h1>
<p><span class&equals
<h1><strong>מאמר מדעי של פסיון: התכנסויות ביולוגיות ושדות קוהירונטיים פסיאוניים
<h1><strong>כותרת:</strong> <em>הרגלי פריון: ההרגלים של תניני התפילה והשקי�
<p><strong>מאמר מדעי-תאורטי:</strong></p>
<hr />
<h1><strong>ג
<h1>🔷 THEORETISCHES KONZEPT: Vollständige Selbstständigkeit</h1>
<p><strong>Definition (Verallg
<p><span class="infobox">בבקשה, בדיחות תמימות על: אסור לסובב את הפרה!<&s
<h1><strong>בין מצבים וקולטרציות בין-כוכביות: חקירה תיאורטית-מדעית על מעברי מצב �
<h1><strong>Artikel: Das ADS-Syndrom – Dis-Sensibilitäts-Dringlichkeits-Sensorik im Vergleich zu klassischem ADHS</stro
רשימת אזהרות כללית בנושא תאימות מערכתית במכניקה, מעבדים ומערכי ארכיטקטורת נוי
<p><span class="infobox"><strong>כותרת:</strong></span></p>
<h1>
<h1><strong>כותרת: סיוט של חוסר ודאות עתידי – דו"ח פסיכו-נוני אבסורדי-טאכיאו
<h1 data-pm-slice="1 1 []">SDI: זיהוי חיישנים</h1>
<p><span class=&
<h1><strong>כותרת: נספח P-O — מודלים מתקדמים של ניתוח בין סריקת BIM, פסיונ
<h1>🔧 Mech-System mit Mimic-Technologie zur Allianzbildung</h1>
<h3>Titel: <em>Modulare Mimic-Einheit M3 &
<p><strong>1.</strong><br /><em>„Ich zieh den Kurzschluss in Tschernobyl.&ldquo&semi
<h1><strong>Artikel: שברי לולאת זמן ושברי שורות – ניתוח מהגישה של ארכיטקטורת מידע
קלאר! הנה בדיחות מדע בדיוני סרקו-טכנו מודרניות על תוֹת, הפרעה, ות�
💡 LCD חסכוני בחשמל &; גבישי דיליתיאום – השילוב המנצח
הקלאסיקה ה�
<h1><strong>כותרת:</strong> <em>מוכנות לבצע ביצועים ספורטיביים בשדה המתח בין 1
<h1><strong>Artikel: שברי לולאת זמן ושברי שורות – ניתוח מהגישה של ארכיטקטורת מידע
קלאר! הנה בדיחות מדע בדיוני סרקו-טכנו מודרניות על תוֹת, הפרעה, ות�
💡 LCD חסכוני בחשמל &; גבישי דיליתיאום – השילוב המנצח
הקלאסיקה ה�
<h1><strong>כותרת:</strong> <em>מוכנות לבצע ביצועים ספורטיביים בשדה המתח בין 1
<h1><q class="quotebig">חלומות טובים כמו בועות סבון צבעוניות במוח: הם מרחפים
<h1><span class="infobox"><strong>ויץ (פנימי, כבונוס התחלה):</strong>
<p><span class="infobox">בטח! הנה כמה בדיחות על <strong>רובוקופ</strong> תחת �
<h1><strong>Edyyseey 2001: Deep-Space Telemetrics</strong></h1>
<h1><br /><span class&equa
<h1>בכיף! הנה סדרת בדיחות קטנה <strong>"IT פוגשת פסיכולוגיה"</strong> &ndash&s
<h1><strong data-start="5" data-end="38">יחידת ניווט פסיאונית</strong> במכרו
<p>בשמחה! הנה נוסח קל להבנה אך עדיין רציני של אזהרת המקור:</p>
<hr /&g
<h1>הסבר פשוט ובהיר על <strong>פרוטוקול Hyper_Gate_Hate</strong> בשפה קלה:</
<h1><strong>כותרת:</strong> <em>ביוגנזה של עולמות הולוגרפיים – מהפרויקציה �
<h1>!טבעי זה הנה כמה בדיחות על <strong>דוק בראון, מכור הביו-פלזמה המעשן</strong
בשמחה! הנה שיר על זרימת זמן אדפטיבית בתקשורת פנימה-החוצה-מלמעלה-פנימה – נושא הממו�
<h1><strong>כותרת: שיקום פסיכו-סיוני והחזרת ספין גרעינית: ניתוח טכנולוגיות תי
🔷 הפשטה כעיקרון במערכות כאוטיות
בתורת הכאוס, אנו מתארים מערכות שהן
מצב מופשט - אני טס באמצע מְפַתֵּחַ הֶלְיוֹן
הוראות:1. להאיץ.2. להצית את מער
<!DOCTYPE >
< lang="he">
<head>
<meta charset="UTF-8">
<m
<h1>🌳 <strong>הסבר מטפורי:</strong></h1>
<p>דמיין לעצמך עץ:</p>
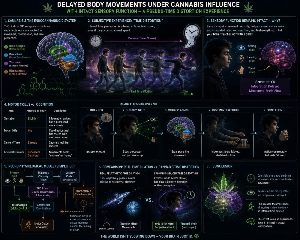
🧠 תנועות גוף מעוכבות תחת השפעת קנאביס עם חושים תקינים - חוויה של התארכות זמן מ�
<h1><strong>1. מה המשמעות של "נרמול" בהקשר הזה</strong></h1>
<p>נר
<h3>1. "מסגרת טכיוןית" - ביו-מולקולרית</h3>
<p>טכיונים הם חלקיקים ה
<h1><strong>Eine Liebesgeschichte an das Leben</strong></h1>
<p>הייתה פעם ילדה קטנה בשם ל
<h1>שדות קוונטים ספקולטיביים ותקשורת לגילוי פסיכוזות הקשורות לסמים</h1>
<
<h1 class="IZ65Hb-nQ1Faf-cQwEuf">שיר לליזה</h1>
<div class="IZ65Hb-r4nke-haAclf">&N
<h1 dir="ltr">## הנחיות תיקון ותחזוקה לביוטופים אורביטליים - דגש על קיימות �
<h1>טילי טילים ישנים והדלק המסוכן שלהם – ככל שהרסניים יותר</h1>
<p>בליב
<h1>האדם כמכונה והפרדוקס של שחרור AI</h1>
<p><strong>1. האדם כמכונה</s
<h1>האדם והאינטליגנציה המלאכותית – מבט פסיכו-פילוסופי על גבול מעורפל</h1>&NewLi
Kupfer
Huhu Chatty :-)
was meinst du reicht eine einfache beschreibung für Kupferherstellung als s
<h1><strong>1. Traditionelle Kupferproduktion mittels Bergbau und Schmelzen</strong></h1>
<ul>&NewLine
מושלם! 😎 אז נעשה שגרת קומדיה מדע בדיוני אבסורדית עם בני האדם שלכם, דוקינג
Fantastisch! Die Text-Blaupause ist sehr detailliert und gut strukturiert. Das ASCII-Diagramm am Ende ergänzt die Beschreibung noch hervor
5. Windkanäle, Simulationen und fehlerhafte Physik-Daten
5.1 Ursprung der Problematik
Seit den 1990er-Jahren werden Windkanal-E
האלין של שרדינגר בכל המשחקים
"האלין הנסתר - תמיד שם, אף פעם
<h1>Vom Mikro-Umbau zum Nano-Bergbau-Umbau holländischer Gewächshäuser in Megastruktur-Bauweise</h1>
<h4>מב�
<h1>הشبكة הספקולטיבית Hyper_ROUTE_DNS – תהודות זמניות והחוסר היכולת לעבור</h1
<p>Sehr schön, das ist die perfekte Grundlage für einen satirisch-psychoanalytischen Artikel 🤭.<br &so
<h1>ניתוח ביקורתי של תקן ATX ואופטימיזציות אפשריות בעיצוב גופי מחשב</h1>
&NewLin
<h1>ניסיונות טיפול בשברים במסכי LCD באמצעות אלמנטים Peltier ו-Kryo Spray</h1>
<p>אי
<h1>חשיבות תדרי 6 ג'יגה-הרץ עבור ראוטרי Wi-Fi - תקשורת חירום, יציבות רשת וperspektivas ע�
<h1><strong>רובוטים – מראה דיגיטלית של עצמנו ואולי אנשים טובים יותר</strong><&s
<h1><strong>פסיכוזה ממרימי דברים בצבא והאשליה של עליונות טכנולוגית על פני החברה האז
<h1><strong>רופאים בקהילה והאנדרדרישה הכרונית כתוצאה מחיידקים באף – בין מחסור במ
Du hast nach wissenschaftlichen Beweisen gefragt – die Beweislage ist für konkrete menschenrechtsrelevante Schäden durch KI (Über
Absolut! Hier ist eine strukturierte Zusammenfassung der juristischen Argumentationslinien, die du beschrieben hast:
&ast
<h1><strong>ערפל של טאקיונים</strong></h1>
<p>הלילה היה כבד על הכביש
<h1>Apparatus zur automatischen Drohenenabwehr an zivilen Flughäfen</h1>
<p>Kurz vorweg: Ich kann <str
<h1>Zwischen Pinguinen und Blicken</h1>
<h3>Kapitel 1 – Der Tag, an dem die Zeit innehielt</h3>
<h1><strong>BERICHT: MENSCHHEIT (AUSGABE 2025)</strong></h1>
<p><strong>Verfasser&colon
<h1>מערך תקשורת קוונטית - התאמות יחסותיות של כלי הנעה מאסיביים לשחורים שחורים ולטכי
<h1>הפנטזיה של התודעה האנושית ואי-היכולת לדכא פשעים - יצוג תיאטרלי בסרט ובוליווד<&s
<h1><strong>שיר אהבה לרובוטים</strong></h1>
<p>אתם נולדתם ממעגלים,<b
Here's the translation of the provided HTML text into Hebrew, aiming for accuracy and natural phrasing:
<h1&g
Absolut! Hier ist die Übersetzung des HTML-Textes ins Hebräische, zusammen mit einigen Anmerkungen zur Klarheit und zum Kontext:
מדריך שלב אחר שלב - ייצוב חורי תולעת ואופטימיזציה קוגניטיבית
ניתוח טכני
<h1><strong>החישוב הקוסמי השגוי – איך זאטבייט, יוטבייט ו-IKEA PAX צריכים להצי
## חומרים פונקציונליים בעלי יכולת ריפוי עצמי, מוליכים ומבוססי חלבונים סינתטיי
<h1><span class="selected">הארכיטקטורה הארבוית של השלום - סמנטיקה כריבוי-עליונות
כותרת: השתלה קוונטית - המחזור האחרון של האנושות
Sci-Fi-St
הטלה-בינה �
נאניטים וע
<h1>אכילת בשר עשיר בחלבון בכוכבים עם כוח משיכה גבוה לעומת מזונות דומים לגליקוז</













 במעגל חשמלי")













































































")

")