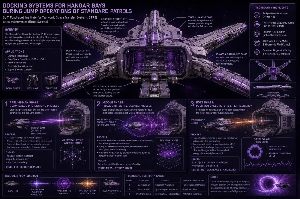
Protocol de viatge hiperràpid
Concepció impulsora: „Impuls d’aspiració de forat de cuc“ (WSA)
Mòdul EscapePod
i comparació amb el
„Sistema de navegació multi-forat de cuc“ (Jumpdrive)
🌀 1. Impuls d’aspiració de forat de cuc (WSA)
Principi de funcionament:
S'obre un forat de cuc directament davant de la nau espacial, la gravetat interna del qual és tan forta que genera una dilatació temporal i curvatura de l’espai-temps dirigida. La nau és aspirada passivament, mentre que l'espai-temps es estén – similar a un remolí còsmic.
Concepció tècnica:
-
Obertura de forat de cuc individual: Un forat de cuc estabilitzat amb punt d’eixida controlat.
-
Impuls de dilatació temporal: L'atracció no és gravimètrica, sinó espai-temporal – no s'és accelerat, sinó accelerat per desacceleració, cosa que als observadors externs sembla un salt en el temps amb estirament.
-
Font d’energia: Matriu de col·lapse de tàquions + camps d'inversió temporal.
Avantatges:
-
Molt eficient per a escapades puntuals o canvis de direcció espontanis.
-
Aprofita els adients naturals d’energia espai-temporal, sense problemes de inèrcia.
Desavantatges:
-
Extremadament difícil de controlar – "Un cop aspirat, difícilment frenat".
-
Només es pot navegar de manera limitada – adequat per a una sortida d’emergència o moviment tàctic, menys per a un viatge lineal.
🚀 2. Sistema de navegació multi-forat de cuc (Jumpdrive)
Principi de funcionament:
Aquí s'obren diversos forats de cuc simultàniament: de 1 a 9 més coordenades X, depenent del sistema objectiu. Aquests forats de cuc es travessen seqüencialment o paral·lelament, creant un camí complex a través de l’espai hiperràpid.
Concepció tècnica:
-
Matriu de forats de cuc: Un algorisme calcula cadenes de salts a través de punts espai-temporals.
-
Desplaçament de fase posicional: Cada salt conté un desplaçament temporal/espacial, amb càrrega positiva intermèdia.
-
Unitat d’orientació: Psiònica o amb cristall de navegació (similar a una brúixola quàntica).
Avantatges:
-
Precisió de navegació alta, fins i tot més enllà dels límits galàctics.
-
Permet rutes d'atac o fugida simultànies.
-
Moviment extremadament ràpid, parcialment per sota de qualsevol durada mesurable.
Desavantatges:
-
Alt consum energètic, especialment en cascades de salts.
-
Perill d’interferències de forats de cuc si massa nodes són inestables.
🔄 Comparació en resum:
| Característica |
Impuls d’aspiració de forat de cuc |
Jumpdrive (Multi-forat de cuc) |
| Mecanisme |
Aspiració per gradient espai-temporal |
Salt seqüencial/paral·lel |
| Control |
Baix / passiu |
Alt / actiu |
| Velocitat |
Extrema, però difícilment mesurable |
Flexible i escalable (5(HP)) |
| Navegació |
Gairebé impossible |
Alta precisió |
| Risc |
Desorientació / Aspiració infinita |
Fragmentació en cas de calibratge erroni |
| Àmbit d’ús |
Fugida / Curt recorregut / Sorpresa |
Llarg recorregut / Estratègia / Exploració |
Si vols, puc descriure't encara una interfície de cabina o esbossar una simulació fictícia d’un viatge amb ambdós impulsors.


Inducció en xarxes aïllades
22.10.2020
Com penetres en xarxes aïllades que estan tallades del món exter
Aquí teniu la traducció al català del text HTML que heu proporcionat:
<h1>El Ser, el que esdev&eacu
Aquí hi ha una barreja de comèdia tòxica i sarcàstica de **lògica de perseguidor**, **amor amb 0 d'IQ** i amor tòxic - evidentment purament ficci
"Per què els aliens de intel·ligència zero van fallar en invadir la Terra?*
JOC, Blaga, Kawały, Dowcipys
Aquí hi ha una porció d'humor polític satíric sobre els parlaments XXL i les augmentacions de salaris, sense cap dubte amb un guiñol i exageracion
Aquí ve la visió satírica i foscament del **món dels hackers de ransomware**
Joc, Broma
<p> </p>
<hr />
<h1>🌀 <strong dir="rtl">VIATGES EN EL TEMPS SENSE P
🛰️ SOL·LICITUD PER A SOLARIS 03/04/02
Unitat de govern de l'administració c
🛡️ SISTEMES D'ESCUT DE CIÈNCIA FANTÀSTICA
Escuts defensius enèrgics, temporals i particulats
<p> </p>
<hr />
<h1>⚛️ <strong title="H₂–H₃–H₄ RAFFINATI
⚡ ENERGIA AVANÇADA G
Sistemes Generation‑G per a estacions espacials, xarxes planet&ag
💧☢️ Refinació d'aigua a partir de compostos d'uràni
(Extracció d'aigua de roques amb uràni – per exemple
<h1>🛰️ <strong>ADVERTÈNCIES BÀSIQUES DE CONSTRUCCIÓ D'ESTACIÓ ESPACIAL</strong></h1>
⚠️ ADVERTIMENT: ACTIVITAT DE CLONATGE EN BIOTOPS I SISTEMES D'ENFULLAT DE TANKS
🔬 Avís crític de se
🩺 MEDIKIT TIP C
Mòdul d'Emergència Compact per a Medicina Bio i Quàntica
🔒 PROTOCOL ESTÀNDARD G7
Classificació: PROTOCOL D'INTERVENCIO OBJETIVITZATEstat:
PROTOCOL ESTÀNDARD A1, formulat al estil d'un sistema oficial de estação espacial o governamental dins un ordre tecnològic molt ava
🔊 PROTOCOL ESTÀNDARD – SEGNAL PORTADORA
Designació: PROTO-TS/CORE-Ω-0001Versió:
<h2 data-start="192" data-end="238">🧬 PROTOCOLS DE TERMINACIÓ EN 3 SEGONS DE CLONATGE</h2>
&New
🌀 GENERADOR DE MATÈRIA
Fabricant: Solaris Core Industries, Departament "Transmutació
⚠️ Assumpte: Ús de drogues coercitiu – Una perspectiva científica i ètica en sistemes reals i ficticis
🧬
Títol: Visió Adaptativa mitjançant l'ús de la Constanta de Dilatació del Temps d'Einstein - Un Enfantament Teòric-Físic dels Processos P
Títol: Tecnologia de Propulsores de Strafe Adaptatius en Drones Tàctics de Combat: Patrons de Vol Asíncronics, Reducció de Costos i Manovre
<h1><strong>Article Científic: El Complex Militar-Industrial – Mitjans Civils per a la Recopilació d'Informaci&o
<h1>🔷 CONCEPTE TEÒRIC: Independència Total</h1>
<p><strong>Definició (Generalitzada&
<h1><strong>Article: The ADS Syndrome – Dis-Sensitivity, Urgency, and Sensory Perception Compared to Classic ADHD<&s
<h1><strong>Títol: L'espectre de la incertesa futura – Un informe absurd-psicònico-taconià</strong
<h1>SDI: Detecció de sensors</h1>
<p><span class="infobox"><strong>Bromes sat&iacut
<h1><strong>Títol: Annex P-O — Models analítics avançats entre la rasterització BIM, la psionia i
<h1>🔧 Mech-Sistema amb Tecnologia Mimètica per a la Formació d'Aliances</h1>
<h3>Títol: &l
Títol: Consideracions quantunociençífiques sobre la Contenerització, Compressió i Descontenidorització
<h1>Clar! Aquí teniu uns quants acudits satírics sobre: <strong>“Fotre, un Déu vola
<p><strong>1.</strong><br /><em>“Jo, henclet el curtcircuit a Txernòbil&peri
<h1><strong>Annex A: Sistemes de punteria en Mechs amb Acoblament Psíquic — Una anàlisi absurd-psíquico-taquio
<p data-start="80" data-end="283"><strong data-start="80" data-end="126">Or
<h1>Artikel: Fragments de bucles temporals i fragments de línia – Una anàlisi des del punt de vista de l'arqu
Clar! Aquí arriben modernes acudits de ciència-ficció SarkoTechno sobre Thoth, el Faraó,
<p><span class="infobox"><strong>Informe Arqueològic</strong></span></p>
&
💡 LCD de baix consum i cristalls de dilithi – La combinació imbatible
El clàssic d'estalvi energ&eg
Article Científic-Tècnic: Sistemes d'amarres a la baia de l’hangar en operació “Salt” de la Patroulla Es
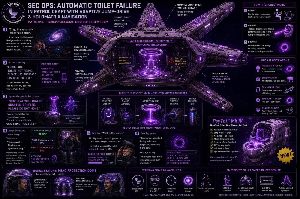
Clar! Aquí hi ha alguns refranys psicotàquions-tecopsicologics sobre el tema "vàter automàtic que falla a
5. Reordenació Atòmica en el Cos del Mech: Transformació Cúbica i Pèrdua d'Identitat
Imagi
<h1><strong>Títol:</strong> <em>Preparació esportiva en el conflicte entre el 100 %, 110 &perc
<h1><strong>Títol: Anàlisi psicopatològica-científica de la fenomenologia del crioplasma en ecosistemes de fi
<p data-start="80" data-end="283"><strong data-start="80" data-end="126">Or
<h1>Artikel: Fragments de bucles temporals i fragments de línia – Una anàlisi des del punt de vista de l'arqu
Clar! Aquí arriben modernes acudits de ciència-ficció SarkoTechno sobre Thoth, el Faraó,
<p><span class="infobox"><strong>Informe Arqueològic</strong></span></p>
&
💡 LCD de baix consum i cristalls de dilithi – La combinació imbatible
El clàssic d'estalvi energ&eg
Article Científic-Tècnic: Sistemes d'amarres a la baia de l’hangar en operació “Salt” de la Patroulla Es
Clar! Aquí hi ha alguns refranys psicotàquions-tecopsicologics sobre el tema "vàter automàtic que falla a
5. Reordenació Atòmica en el Cos del Mech: Transformació Cúbica i Pèrdua d'Identitat
Imagi
<h1><strong>Títol:</strong> <em>Preparació esportiva en el conflicte entre el 100 %, 110 &perc
<h1><strong>Títol: Anàlisi psicopatològica-científica de la fenomenologia del crioplasma en ecosistemes de fi
<h1><q class="quotebig">Els bons somnis són com bombolles de sabó multicolores al cervell: floten breument
<h1><span class="infobox"><strong>Petjada (intern, per a tu com a extra de sortida):</stron
<p><span class="infobox">Per descomptat! Aquí teniu uns quants acudits sobre <strong>RoboCop</strong&
<h1><strong>Edyyseey 2001: Deep-Space Telemetrics</strong></h1>
<h1><br /><span class&equa
<h1><strong>„Puc agafar una mica d’electricitat?“</strong></h1>
<hr &s
<h1>Moltes gràcies! Aquí teniu una petita sèrie d'eines „IT es troba amb la psique“<&
<h1><strong data-start="5" data-end="38">Unit de navegació psionica</strong> en la <stron
<!DOCTYPE >
<>
<head>
<title>Protocol A1 - Andoque a Singularitats</title>
</
<h1><strong>Informe Psioníquic: Anàlisi de Bio-signatures en el camp d'escaneig</strong><br /><
<p>Gairat! Aquí teniu la <strong>formulación fàcil d'entendre, però encara amb un to seriós&
<h1>Clar! Aquí és una explicació senzilla i clara en llenguatge fàcil sobre el protocol <strong>Hyper_G
<h1><strong>Títol:</strong> <em>Biogènesi de mons hologràfics – De la projecció
<h1><strong>Perspectiva Teòrica: El "Costa Concordia" des de la perspectiva d'un reglament de Space Marine Mercenar
<h1>Naturalment! Aquí teniu uns quants acudits sobre <strong>Doc Brown, el junkie bio fumador de cànnabis</stro
Gern! Aquí teniu un poema sobre el flux adaptatiu del temps en una comunicació in–out–outer–
<h1>Naturalment! Aquí hi ha uns quants acudits sobre l'escenari:</h1>
<p><q class="quot
<h1><strong>Títol: Reconstrucció psiónica i reflectació d'espín nuclear: Anàlisi de
<h1><strong>Poemes</strong> a les teus temes, en l'estil d'una barreja de <strong>poesia post-quantàntic
<p><strong>Article Científic:</strong></p>
<hr />
<h1>El Dilema del Traumati
<h1>🔷 <strong>Abstractció com a principi en sistemes càotics</strong></h1>
<p>En la <stro
Situació Abstracta - Estic volant al centre d'un reactor de fusió
Instruccions:1. Accelerar.2. Encendre el postcombustor (no imme
<p><span class="infobox"><strong>Article científic sobre la Psionia</strong></span></p
Perspectives on the British Isle with Scotland as a Grid Structure – A Speculative-Futuristic Analysis:
🏴 S
<h1>🧠 Definició Científica d'una "Pregunta" a un Ordinador (Independentment de la Introducció del Teclat&
<p>Després d'un <strong>super-accident nuclear</strong> (el més gran imaginable), especialment en
<h1>Precis — això és el punt clau: <strong>Si es defineixen com a variables fixes l'identitat, l&
<h1>🌀 1. Transport Teòric d'Estats Quàntics</h1>
<p><strong>Definició:<&so
<h1>🌳 <strong>Explicació metafòrica:</strong></h1>
<p>Imagina't un arbre:&l
<h1>🧠 <strong>Anàlisi psicològica i social del fenomen humà:</strong></h1>
<h4>
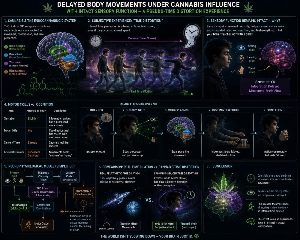
🧠 Moviments corporals retardats sota influència de cànnabis amb sensibilitat intacta - una experiència pseudo-dilatador
<h1><strong>1. Que significa „Normalització“ en aquest context</strong></h1>&Ne
<h3>1. "Tachonitzèr" Marc – Biologia Molecular</h3>
<p>Els tachions són partícule
<h1><strong>Una història d'amor a la vida</strong></h1>
<p>Hi havia una vegada una nena petita qu
<h2><strong>El paradoxa de la cortesia: “Gràcies” com a desencadenant de càrregues històr
<h1>Concepte Especulatius de "Camps Quàntics" i Comunicació per a la Detecció de Psicosis Induïdes per Drogues<
<h1 class="IZ65Hb-nQ1Faf-cQwEuf">Un poema per a Lisa</h1>
<div class="IZ65Hb-r4nke-haAclf&
<h1>Reparatur- und Wartungsanleitung für Orbitale Biotope - Fokus auf Nachhaltigkeit und Sicherheit – Eine Anleitung für Indien<&s
<h1>Altes i combustible perillós: més explosiu</h1>
<p>Al cor del complex militaroindustrial hi ha un par
<h1>Informe Científico: El Envejecimiento como Consecuencia de Errores de Manejo y Mecanismos Reguladores Celulares</h1>&NewLi
<h1>Der Mensch als Maschine und das Paradox der KI-Entladung</h1>
<p><strong>1. Mensch als Maschine</stro
<h1>L'humà i la intel·ligència artificial – Consideració psico-científica d'una frontera indist
<h1>Der hypothetische PEG-IGD-Komprimierungsstandard - Ein wissenschaftlicher Überblick</h1>
<h2>Einleitung<
Kupfer
Huhu Chatty :-)
was meinst du reicht eine einfache beschreibung für Kupferherstellung als s
<h1><strong>1. Producció tradicional de coure mitjançant mineria i fusió</strong></h1>
<h1>Perfecte! 😎 Llavors farem una <strong>rutina de comèdia de ciència-ficció absurda</strong> amb els t
Das ist eine hervorragende und sehr detaillierte Text-Blaupause! Sie ist klar strukturiert, gut erklärt und die Verwendung von ASCII-Art f&
5. Windkanäle, Simulacions i dades físiques errònies
5.1 Orígens del problema
Des de la dècada de 1
<h1>Lebenslänglich deluxe</h1>
<p>😅 das ist ein schöner Mix – Knast-Humor triff
L'Alien de Schrödinger en tots els jocs
"L'Alien Escondit - sempre allà, mai allà, sempre a tot arreu"
<h1>Vom Mikro-Umbau zum Nano-Bergbau-Umbau holländischer Gewächshäuser in Megastruktur-Bauweise</h1>
<h4
<h1>Das Spekulative Hyper_ROUTE_DNS-Netzwerk – Temporale Echos und die Unmöglichkeit von Übe
<p>Moltíssim bé, aquesta és la base perfecta per a un article satíric-psicoanalític 🤭. Aquí
<h1>Anàlisi Crítica de l'Estandard ATX i Possibles Optimitzacions en el Disseny de la Gàseta</h1>
&NewLin
<h1>Experimentelle Ansätze zur Reparatur von LCD-Rissen mit Peltier-Elementen und Kryo-Spray</h1>
<p>LCD-Kristalle selbs
<h1>La importància de les freqüències de 6 GHz per a routers WLAN: comunicació d'emergència, estabi
<h1><strong>Bots – Digitals que de nosaltres i potser les persones millors</strong></h1>
&l
<h1><strong>Drogadipsos a l'exèrcit i l'il·lusió de la superioritat tecnològica sobre la societat civi
<h1><strong>Metges de camp i la subfinançament crònic a través del refredat – Entre l'esgotament dels recursos
Das ist eine sehr umfassende Antwort, die nicht nur zahlreiche Quellen auflistet, sondern auch einen juristischen Kontext herstellt und Mö
<ol>
<li>
<p>Diese Belege sind überprüfbar, peer-reviewt bzw. amtlich dokumentiert; sie bilde
<h1>Nebel aus Tachyonen</h1>
<p>Die Nacht lag schwer auf der Autobahn, eine endlose, graue Fläche&c
<h1>Apparatus zur automatischen Drohenenabwehr an zivilen Flughäfen</h1>
<p><span class="infobox
<h1>Zwischen Pinguinen und Blicken</h1>
<h3>Capítol 1 – El dia en què el temps es va aturar</h3>
<h1><strong>INSANITY REPORT: HUMANITY (ISSUE 2025, REVISED)</strong></h1>
<p><strong
<h1>Quanten-Komunicació-Array - Relacions i coincidències relacionades amb armes de motor de massa fins als forats negres i tàqu
<h1>Article teòric-científic: Camp de gravetat quàntica i el paper de les centrals nuclears de urani en sistemes de dilaci
<h1>La fantasia de la consciència humana i la impossibilitat de la repressió de crims - Sobre la configuració teatral en cinema
<h1><strong>Ode als Robots</strong></h1>
<p>Sou nascuts de circuits,<br />
de fils&
Aquí teniu la traducció al català del text HTML:
<h1>Consum de drogues, psicofarmàcia i la r
catalan
<h1>La transformació d'un ordinador quàntic en un font tradicional</h1>
<h3>Un enfocament
Aquí teniu la traducció al català:
<h1>Caiguda del llenguatge per revolució cultural i drogues&col
Absolut! Hier ist die Übersetzung des HTML-Textes ins Katalanische, unter Berücksichtigung der technischen Details und des Kontextes&c
Aquí teniu la traducció al català del text HTML:
<h1><strong>Sistemes de Computació de T&agr
Aquí teniu la traducció al català:
<h1><strong>La Fehl-càlcul Cósmica &ndash&semi
Aquí teniu la traducció al català del text HTML proporcionat:
<p><strong>Títol:<&so
Aquí teniu la traducció al català:
<h1><span class="selected">L'Arquitectura
<h1>Essen von proteinreichem Fleisch auf Planeten mit hoher Schwerkraft versus zuckerähnliche Nahrung</h1>
<p>
<h1><strong>Com vaig obtenir la nacionalitat britànica - Veritat històrica</strong></h1>
<p>&Ea