ņĀ£ļ¬®: ņłśņżæ ļ▓īņ¦æ ņČöņ¦ä ņŗ£ņŖżĒģ£ ŌĆō ņĄ£ņŗĀ ņ×ĀņłśĒĢ© ļ░Å ĻĄ¼ņČĢĒĢ©ņØś Ēśüļ¬ģņĀüņØĖ ĒÜīĒö╝, ņČöĻ▓® ļ░Å ļ░śņØæ ļ®öņ╗żļŗłņ”ś
ņä£ļĪĀ
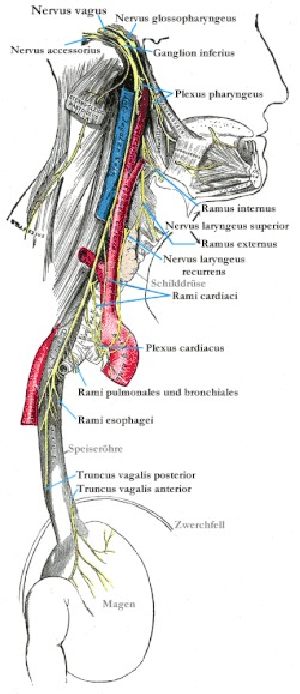
ņśżļŖśļéĀ ĒĢ┤ņĀäņØĆ ĒŖ╣Ē׳ ņłśņżæ ņ×æņĀä ļ░Å ņŚ░ņĢł ĻĘ╝ņĀæ ĻĖ░ļÅÖ ņśüņŚŁņŚÉņä£ ļüŖņ×äņŚåņØ┤ ņ”ØĻ░ĆĒĢśļŖö ĻĖ░ņłĀ ņŚŁĒĢÖ Ļ┤ĆĻ│äņŚÉ ņśüĒ¢źņØä ļ░øĻ│Ā ņ׳ņŖĄļŗłļŗż. ļō£ļĪĀņØä ĒåĄĒĢ£ ĻĄ░ņé¼ ĻĖ░ņłĀņØś ĒĢŁĻ│Ą ņÜ░ņŻ╝ Ļ│ĄĻ░ä ņØ┤ņĀäņØ┤ ļäÉļ”¼ ļģ╝ņØśļÉśĻ│Ā ņ׳ņ¦Ćļ¦ī, ņóģņóģ Ļ░äĻ│╝ļÉśļŖö Ēø©ņö¼ ļŹö ņżæņÜöĒĢ£ Ļ│ĄĻ░äņØ┤ ņ׳ņŖĄļŗłļŗż. ļ░öļĪ£ ĒĢ┤ņ¢æņØś ņŗ¼ņŚ░ņ×ģļŗłļŗż.
ņĀĢļ░Ć ņ¢┤ļó░, ļ░śņØæņä▒ņØ┤ ļ╣ĀļźĖ ņ×Éņ£© ņłśņżæ ĒÅŁĒāä ļ░Å ņŖżņø£ ĻĖ░ļ░ś ļō£ļĪĀ ņŗ£ņŖżĒģ£ņØś ņČ£Ēśäņ£╝ļĪ£ ņ×ĀņłśĒĢ©Ļ│╝ ņåīĒśĢ Ēæ£ļ®┤ ĒĢ©ņäĀ ļ¬©ļæÉĻ░Ć ļüŖņ×äņŚåņØ┤ ņ”ØĻ░ĆĒĢśļŖö ņ£äĒśæņŚÉ ņ¦üļ®┤ĒĢ┤ ņ׳ņŖĄļŗłļŗż. ņØ┤ļ¤¼ĒĢ£ ļ¦źļØĮņŚÉņä£ ĒĢŁĻ│Ą ņé░ņŚģņŚÉņä£ ņØ┤ļ»Ė ņä▒Ļ│ĄņĀüņ£╝ļĪ£ ņ×ģņ”ØļÉ£ ļ▓īņ¦æ ņČöņ¦ä ņŗ£ņŖżĒģ£ ĒåĄĒĢ®ņØĆ ĒĢ┤ņāü ņĀäĒł¼ņŚÉņä£ņØś ĻĖ░ļÅÖņä▒, ļ░śņØæ ņåŹļÅä ļ░Å ņāØņĪ┤ Ļ░ĆļŖźņä▒ņØä ņ£äĒĢ£ ĒśüņŗĀņĀüņØĖ ņāłļĪ£ņÜ┤ Ēī©ļ¤¼ļŗżņ×äņØä ņĀ£ņŗ£ĒĢ®ļŗłļŗż.
ņØ┤ Ļ│╝ĒĢÖ ĻĄ░ņé¼ ļģ╝ļ¼ĖņØĆ ņłśņżæ ņ░©ļ¤ē(ĒŖ╣Ē׳ Ļ│ĄĻ▓® ņ×ĀņłśĒĢ©)Ļ│╝ ņåīĒśĢ ĻĄ¼ņČĢĒĢ© ļČĆļīĆņŚÉņä£ ņØ┤ ĻĖ░ņłĀņØś ņĀüņÜ® Ļ░ĆļŖźņä▒Ļ│╝ ņØ┤ņĀÉņØä ņĪ░ļ¬ģĒĢ®ļŗłļŗż. ļśÉĒĢ£ ļ¼╝ļ”¼ĒĢÖņĀü ņøÉļ”¼, ĻĄ░ņé¼ ņĀäņłĀņĀü ņØ┤ņĀÉ, ĻĖ░ņĪ┤ ņŗ£ņŖżĒģ£Ļ│╝ņØś ĒåĄĒĢ® ļ░Å 21ņäĖĻĖ░ ĒĢ┤ņĀä ĻĖ░ņłĀņØś Ļ░ĆļŖźĒĢ£ ņČöĻ░Ć Ļ░£ļ░£ņØä ņ×ÉņäĖĒ׳ ļČäņäØĒĢ®ļŗłļŗż.
1. ņłśņżæ ļ▓īņ¦æ ņČöņ¦ä ŌĆō ĻĖ░ļ│Ė ņøÉļ”¼
ĒĢ┤ņāü ĒÖśĻ▓ĮņŚÉņä£ ļ▓īņ¦æ ņČöņ¦äĻĖ░ļŖö ņ×ĀņłśĒĢ© ļśÉļŖö ĻĄ¼ņČĢĒĢ© ņäĀņ▓┤ņØś ļŗżņ¢æĒĢ£ ņ¦ĆņĀÉņŚÉ ļ¬©ļōłņŗØ ĒśĢĒā£ļĪ£ ņןņ░®ļÉ£ ļŗżļ░®Ē¢ź ļ¦łņØ┤Ēü¼ļĪ£ ĻĄ¼ļÅÖĻĖ░ ņŚŁĒĢĀņØä ĒĢ®ļŗłļŗż. ņŻ╝ ņČöņ¦ä ĒöäļĪ£ĒÄĀļ¤¼ņÖĆ ļŗ¼ļ”¼ ņäĀĒśĢņĀüņØĖ ņĀäĒøä ņÜ┤ļÅÖņØä ņāØņä▒ĒĢśļŖö ļ▓īņ¦æ ņČöņ¦äĻĖ░ļŖö ņ┤łĻ│ĀņåŹ ņĖĪļ®┤, ņāüļŗ©, ĒĢśļŗ© ļśÉļŖö ĒÜīņĀä ņÜ┤ļÅÖ**ņØä ĒŚłņÜ®ĒĢ®ļŗłļŗż.
ņłśņżæ ņ×æļÅÖņØä ņ£äĒĢ£ ļ¼╝ļ”¼ņĀü ņĪ░ņĀĢ:
-
ĒĢ┤ņłś ĒśĖĒÖś ņ×¼ļŻī (ņśł: ļéśļģĖ ļČĆņŗØ ļ░®ņ¦ĆņĀ£ļź╝ Ļ░¢ņČś Ēŗ░ĒāĆļŖä ĒĢ®ĻĖł ļĪ£Ēä░ ļĖöļĀłņØ┤ļō£)
-
ņåīņØī Ļ░Éņåī Ļ│ĄļÅÖ Ēśäņāü ĻĖ░ņłĀ ņØīĒ¢źņĀü ļ░£ņ×ÉĻĄŁņØä ņżäņØ┤ĻĖ░ ņ£äĒĢ┤
-
ņĀüņØæĒśĢ ņ£Āņ▓┤ ĒØÉļ”ä ņĀ£ņ¢┤ĻĖ░ ļ│ĆĒÖöĒĢśļŖö ņ£ĀļÅÖ ĒöäļĪ£ĒīīņØ╝ņŚÉņä£ ļ»ĖņäĖ ņĪ░ņĀĢĒĢśĻĖ░ ņ£äĒĢ┤
-
ņŚ┤ņŚŁĒĢÖņĀü ĒāäļĀźņä▒ ĒÅŁļ░£ ņŗ£ ņś©ļÅä ņČ®Ļ▓®ņŚÉ ļīĆĒĢ£ ņĀĆĒĢŁ
ņØ┤ļ¤¼ĒĢ£ ņŗ£ņŖżĒģ£ņØĆ ņ£äĒśæ ņä╝ņä£ņÖĆ ĒĢ©Ļ╗ś ņ×Éņ£©ņĀüņ£╝ļĪ£ ņ×æļÅÖĒĢśļ®░, ņĖĪļ®┤ "ņĀÉĒöä"ļź╝ ĒåĄĒĢ┤ ļ¼╝ņåŹņŚÉņä£ ļ╣ĀļźĖ ĒÜīņĀä ļśÉļŖö ņ┤łļŗ©ņ£ä ļé┤ņŚÉņä£ņØś ņāüĒĢś ņøĆņ¦üņ×äņØä ĒåĄĒĢ┤ ļ│┤ĒŖĖņØś ņÖäņĀäĒĢ£ ņ×¼ņĪ░ņĀĢņØä ņŗ£ņ×æĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż.
2. ņ×ĀņłśĒĢ© ĒÖ£ņÜ® ŌĆō ĒÜīĒö╝ ĻĖ░ļÅÖ, ņ£äņן ļ░Å ņČöĻ▓® ļŖźļĀź
2.1. ņ¢┤ļó░ļĪ£ļČĆĒä░ņØś ļ░śņØæņĀü ĒÜīĒö╝
ĒśäļīĆ ņ¢┤ļó░ļŖö ņØīĒ¢ź ĒāÉņ¦Ć, ņŚ┤ņĀü ņŗĀĒśĖ ļśÉļŖö ņ×ÉĻĖ░ ņØ┤ņāüņØä ņé¼ņÜ®ĒĢśņŚ¼ ļ¬®Ēæ£ļź╝ ņČöņĀüĒĢ®ļŗłļŗż. ĒåĄĒĢ® ņłśņØīņ¢┤ļĀłņØ┤**, **Ļ┤Ćņä▒ ņä╝ņä£** ļ░Å **AI ĻĖ░ļ░ś ņøĆņ¦üņ×ä ņśłņĖĪ ļ¬©ļōł**ņØä ĒåĄĒĢ┤ ļ▓īņ¦æ ņČöņ¦ä-ņĀ£ņ¢┤ ņ×ĀņłśĒĢ©ņØĆ ņĀæĻĘ╝ĒĢśļŖö ņ¢┤ļó░ļź╝ ņĪ░ĻĖ░ņŚÉ Ļ░Éņ¦ĆĒĢśĻ│Ā Ļ│ĀņŚÉļäłņ¦Ć ņĖĪļ®┤ ĻĖ░ļÅÖņØä ņłśĒ¢ēĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż. ņØīĒ¢ź ņåŹņ×äņłśļź╝ ļ░®ņČ£ĒĢ®ļŗłļŗż. ņ¢┤ļó░ņØś ĻČżņĀüņØĆ ļ│ĄĻĄ¼ ļČłĻ░ĆļŖźĒĢśĻ▓ī ĻĄÉļ×ĆļÉ®ļŗłļŗż.
ņśłņŗ£:
ņ¢┤ļó░Ļ░Ć ņŗ£ņåŹ 60 ļģĖĒŖĖņØś ņåŹļÅäļĪ£ ņĀæĻĘ╝ ŌĆō ņ×ĀņłśĒĢ©ņØĆ ļÅÖņŗ£ņŚÉ ņÖ╝ņ¬Į ļ░Å ņ£äņ¬Į ļ▓īņ¦æ ņČöņ¦äņØä ņé¼ņÜ®ĒĢśņŚ¼ 3D ļ▓ĪĒä░ļĪ£ ĒÜīĒö╝ĒĢśĻ│Ā ņØīĒ¢ź ņåŹņ×äņłśļź╝ ļ░®ņČ£ĒĢ®ļŗłļŗż. ņ¢┤ļó░ņØś ĻČżņĀüņØĆ ļ│ĄĻĄ¼ ļČłĻ░ĆļŖźĒĢśĻ▓ī ĻĄÉļ×ĆļÉ®ļŗłļŗż.
2.2. ņŗ¼ņĖĄ ĒÅŁĒāä Ļ│ĄĻ▓® ĒÜīĒö╝
ņĀĢļ░ĆĒĢ£ ļ▓īņ¦æ ĒÜīĒö╝ ņČ®Ļ▓®ņØä ĒåĄĒĢ┤ ņ×ĀņłśĒĢ©ņØĆ ĒÅŁļ░£ ļ░śĻ▓ĮņŚÉ ļÅäļŗ¼ĒĢśĻĖ░ ņĀäņŚÉ ņŗ¼ņĖĄ ĒÅŁĒāäņØś ĒÅŁļ░£ĒīīļĪ£ļČĆĒä░ ļ▓Śņ¢┤ļéĀ ņłś ņ׳ņŖĄļŗłļŗż. ĒŖ╣Ē׳ ļ╣ĀļźĖ ņĮöļź┤ļ▓│ ļśÉļŖö ņ¢┤ļó░ ĒŚ¼ļ”¼ņĮźĒä░ņØś Ļ│ĄĻ▓®ņŚÉņä£ ņØ┤ ņŗ£ņŖżĒģ£ņØĆ ņāüļŗ╣ĒĢ£ ņāØņĪ┤ņä▒ ņØ┤ņĀÉņØä ņĀ£Ļ│ĄĒĢ®ļŗłļŗż.
2.3. ņČöĻ▓® ļŖźļĀź Ē¢źņāü
ļ▓īņ¦æ ņČöņ¦ä ņןņ╣śļź╝ Ļ░¢ņČś ņ×ĀņłśĒĢ©ņØĆ ņŻ╝ ļÅÖļĀźņØä ĒÖ£ņä▒ĒÖöĒĢśņ¦Ć ņĢŖĻ│ĀļÅä ļ¦żņÜ░ ņĀĢĒÖĢĒĢśĻ│Ā ņĪ░ņÜ®ĒĢśĻ▓ī ņ£äņ╣śļź╝ ļ│ĆĻ▓ĮĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż. ņØ┤ļź╝ ĒåĄĒĢ┤ ņĀü Ļ▓ĮļĪ£ņŚÉ ņĖĪļ®┤ ļÅäĒé╣**, ĒĢ┤ņĀĆņØś ĒśæĻ│ĪņØ┤ļéś ļÅäļ×æņŚÉņä£ **ĻĖ░ļÅÖ** ļśÉļŖö ļŹ«Ļ░£ļź╝ ļÆżļĪ£ ĻĖēĻ▓®Ē׳ ļéśĒāĆļéś ņ¢┤ļó░ ļśÉļŖö ņ£ĀļÅä ļ»Ėļŗł ļō£ļĪĀņ£╝ļĪ£ **Ļ╣£ņ¦Ø Ļ│ĄĻ▓®**ņØä ņŗ£ņ×æĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż.
3. ņåīĒśĢ ĻĄ¼ņČĢĒĢ© ĒÖ£ņÜ® ŌĆō ņŚ░ņĢł ļ░®ņ¢┤, ļō£ļĪĀ ļ░®ņ¢┤ ļ░Å ĻĖ░ļÅÖņä▒
3.1. Ļ│Ąņżæ ļ░Å ĒĢ┤ņāü ņ£äĒśæņŚÉ ļīĆĒĢ£ ļ░śņØæņĀü ĒÜīĒö╝
ņåīĒśĢ ĻĄ¼ņČĢĒĢ©ņØĆ ļŗżņØīĻ│╝ Ļ░ÖņØĆ ļŗżņ¢æĒĢ£ ļ╣äļīĆņ╣Ł Ļ│ĄĻ▓®ņØä ļ░øĻĖ░ ņēĮņŖĄļŗłļŗż.
ņłśļ®┤ņäĀ, ņäĀļ»Ė ļ░Å ļČĆņ£äņØś ļ▓īņ¦æ ņČöņ¦ä ņןņ╣śļŖö ņ¦¦ņØĆ Ļ▒░ļ”¼ņŚÉņä£ņĪ░ņ░© ņ£äĒśæņĀüņØĖ ļ¼╝ņ▓┤ļéś ņČ®ļÅīņØä Ēö╝ĒĢĀ ņłś ņ׳ļÅäļĪØ** ļ╣ĀļźĖ ņČ®Ļ▓® ņÜ┤ļÅÖņØä Ļ░ĆļŖźĒĢśĻ▓ī ĒĢ®ļŗłļŗż. ĒŖ╣Ē׳ ņóüņØĆ ņŚ░ņĢł ĒĢ┤ņŚŁņŚÉņä£ ņØ┤ļ¤¼ĒĢ£ ļ»╝ņ▓®ņä▒ņØĆ Ļ▓░ņĀĢņĀüņ×ģļŗłļŗż.
3.2. Ļ│Ąņżæ ņĀäĒł¼ ņżæ ļō£ļĪĀ ĒÜīĒö╝
ņŗ£Ļ░üņĀü ļ¬®Ēæ£ ņČöņĀü ļ░Å GPS ņ¦ĆņøÉ ļ¬®Ēæ£ Ļ│ĀņĀĢ ņŗ£ņŖżĒģ£ņŚÉ ņØśņĪ┤ĒĢśļŖö ļō£ļĪĀņØĆ Ļ░æņ×æņŖżļ¤¼ņÜ┤ ņĮöņŖż ļ│ĆĻ▓Įņ£╝ļĪ£ ņØĖĒĢ┤ ņåŹņĢä ļäśņ¢┤Ļ░æļŗłļŗż. "ņśłņĖĪ ļČłĻ░ĆļŖźĒĢ£ ņøĆņ¦üņ×ä"ņ£╝ļĪ£ ņĀäĒÖśĒĢśļŖö ņåīĒśĢ ĻĄ¼ņČĢĒĢ©ņØĆ Ļ▓Ćņāē ņĢīĻ│Āļ”¼ņ”śņŚÉņä£ ļČłņĢłņĀĢĒĢ£ ļīĆņāüņ£╝ļĪ£ ļéśĒāĆļéś ĒÜīĒö╝ĒĢśĻ▒░ļéś ņśżļźśĻ░Ć ņ׳ļŖö Ļ▓āņ£╝ļĪ£ Ļ░äņŻ╝ļÉ®ļŗłļŗż.
3.3. ĻĘ╝ņĀæ ņĀäĒł¼ņØś ņĀäņłĀņĀü ĻĖ░ļÅÖ
ņåīĒśĢ ņäĀļ░ĢņØś Ļ│ĀņĀäņĀüņØĖ ņĢĮņĀÉņØĆ ĒÜīņĀä ņåŹļÅäņŚÉ ņ׳ņŖĄļŗłļŗż. ļ▓īņ¦æ ņČöņ¦äĻĖ░ļŖö ņØ┤ļ¤¼ĒĢ£ ļŗ©ņĀÉņØä ļ│┤ņÖäĒĢ®ļŗłļŗż.
ņäĀļ»ĖņØś ņÖ╝ņ¬Į ņČ®Ļ▓®Ļ│╝ ņśżļźĖņ¬Į ņČ®Ļ▓®ņØś ļÅÖņŗ£ ņČ®Ļ▓®**ņØä ĒåĄĒĢ┤ 3ņ┤ł ņØ┤ļé┤ņŚÉ 90┬░ ĒÜīņĀäņØä ņÖäļŻīĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż. ņØ┤ļŖö ĒĢ┤ņĀü Ēć┤ņ╣ś ņ×æņĀä, Ēö╝ņÜöļź┤ļō£ ĻĘ╝ņĀæ ņĀäĒł¼ ļśÉļŖö ĻĖ░ļó░ļÉ£ ĒĢ┤ņŚŁņŚÉņä£ņØś ĻĄÉņĀäņŚÉņä£ ņŚäņ▓Łļé£ Ļ░Ćņ╣śļź╝ ņ¦ĆļŗÖļŗłļŗż.
4. ņČöĻ░ĆņĀüņØĖ ĻĄ░ņé¼ņĀü ņØ┤ņĀÉ
4.1. ļīĆļ¤ē ņāØņé░ ļ░Å ļ¬©ļōłĒÖö
ļō£ļĪĀĻ│╝ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ ļ▓īņ¦æ ņČöņ¦äĻĖ░ ļśÉĒĢ£ Ļ▓Įļ¤ē ņ×ĀņłśĒĢ©** ļ░Å ĻĄ¼ņČĢĒĢ©**ņØä ļ¬©ļōłņŗØņ£╝ļĪ£ ņäżĻ│äĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż. ĻĖ░ļ│Ė ĻĄ¼ņĪ░ļŖö ņ׳ņ¦Ćļ¦ī ņ×äļ¼┤ņŚÉ ļö░ļØ╝ ļŗżļźĖ ļ▓īņ¦æ ņČöņ¦ä ĻĄ¼ņä▒ņØ┤ ļŗżļ”ģļŗłļŗż (ņśł: Ļ░Éņŗ£, ĻĖ░ļ¦ī, ņČöĻ▓®, ņÜ┤ņåĪ). ļö░ļØ╝ņä£:
4.2. ļ▓īņ¦æ ņČöņ¦ä ņ¢┤ļó░ļź╝ ņé¼ņÜ®ĒĢ£ ļīĆ ļō£ļĪĀ ņ¢┤ļó░
ļ¦łņØ┤Ēü¼ļĪ£ ļ▓īņ¦æ ņČöņ¦äĻĖ░ļź╝ ņ×Éņ▓┤ņĀüņ£╝ļĪ£ Ļ░¢ņČś ņ¢┤ļó░ļŖö ļ░®ņ¢┤ ņĪ░ņ╣śņŚÉ ļīĆĒĢ┤ ņĢĮĻ░äņØś ņĮöņŖżļź╝ ņĪ░ņĀĢĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż. ĒÜīĒö╝ļ¦ØņØä "ņĀÉĒöä"ĒĢśĻ▒░ļéś ļ¬®Ēæ£Ļ░Ć ĒÜīĒö╝ĒĢśļĀżļŖö ņŗ£ļÅäļź╝ ļ░śĻ▓®ĒĢśĻĖ░ ņ£äĒĢ┤ ĻĘ╝Ļ▒░ļ”¼ņŚÉņä£ ļŗżņŗ£ Ļ░ĆņåŹĒĢ®ļŗłļŗż.
4.3. ņłśņżæ ĻĘ╝ņĀæ ņĀäĒł¼ ļ░Å ņČ®ļÅī ņĀäņłĀ
ļ▓īņ¦æ ņČöņ¦äĻĖ░ļź╝ Ļ░¢ņČś ņ×ĀņłśĒĢ©ņØĆ ļō£ļĪĀņØ┤ ņ×ÉĻĖ░ņĀüņ£╝ļĪ£ ļČĆņ░®ļÉśĻ▒░ļéś ņäĀņ▓┤ņŚÉ ļö░ļØ╝ ņøĆņ¦üņØ┤ļŖö Ļ▓ĮņÜ░ņŚÉļÅä ļ¼╝ņåŹņŚÉņä£ ĒÜīņĀäĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż. ļ╣äņāüņŗ£ ļ│┤ĒŖĖļŖö ļ╣ĀļźĖ ļīĆĻ░üņäĀ ņÜ┤ļÅÖņØä ĒåĄĒĢ┤ ņØśļÅäņĀüņØĖ ļשĒĢæ Ļ│ĄĻ▓®ņØä ņłśĒ¢ēĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż. ņØ┤ņĀäņŚÉļŖö Ļ┤Ćņä▒ņØ┤ ĒŚłņÜ®ĒĢśņ¦Ć ņĢŖņĢśļŹś ļ¦łņ¦Ćļ¦ē ļ░®ņ¢┤ņ×ģļŗłļŗż.
5. ļ»Ėļל ĒĢ┤ņĀäņŚÉ ļīĆĒĢ£ ņĀäļץņĀü ĒĢ©ņØś
-
ņ×ĀņłśĒĢ©Ļ│╝ Ļ│ĀņåŹ ļ│┤ĒŖĖĻ░Ć Ļ▓░ĒĢ®ļÉ£ ĒĢśņØ┤ļĖīļ”¼ļō£ ņ£Āļŗø**ņØĆ ņ£Īņ¦ĆņÖĆ ļ¼╝ ņĢäļל ļ¬©ļæÉņŚÉņä£ ļ▓īņ¦æ ĻĖ░ļÅÖņØ┤ Ļ░ĆļŖźĒĢśņŚ¼ ĒĢ┤ņŚŁ Ļ▓ĮĻ│äļź╝ ļ░®ņ¢┤ĒĢśļŖö ļÅÖņŗ£ņŚÉ ņØĆļ░ĆĒĢśĻ▓ī Ļ│ĄĻ▓®ĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż.
-
ļåÆņØĆ ļ»╝ņ▓®ņä▒ņØä Ļ░¢ņČś ļ╣äļīĆņ╣Ł ņäĀļ░ĢņØä ĒåĄĒĢ£ ņŚ░ņĢł ļ░®ņ¢┤**ļŖö ņ£ĀņŚ░ĒĢ£ ņŖżņø£ņ£╝ļĪ£ Ļ▓¼Ļ│ĀĒĢ£ ļīĆĒśĢ ņ£ĀļŗøņØä ļīĆņ▓┤ĒĢ®ļŗłļŗż.
-
ņłśņżæ ņŖżņø£ ņĀäņłĀ**: ļ▓īņ¦æ ņČöņ¦ä ļ░Å ņØīĒ¢ź AIļź╝ Ļ░¢ņČś ņ×æņØĆ Ļ│ĄĻ▓® ņ×ĀņłśĒĢ©ņØĆ ļŖæļīĆ ļ¼┤ļ”¼ņ▓śļ¤╝ ļŹö Ēü░ ņ×ĀņłśĒĢ©ņØä ņČöĻ▓®ĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż.
-
ņĀüņØś ļ¬®Ēæ£ ņĢīĻ│Āļ”¼ņ”ś ļ│ĆĻ▓Į**: ĻĖ░ņĪ┤ ņøĆņ¦üņ×ä ņśłņĖĪņØ┤ ņŗżĒī©ĒĢśļ»ĆļĪ£ ņĀĢļ│┤ņŚÉņä£ ļ¬ģĒÖĢĒĢ£ ņÜ░ņ£äļź╝ ņĀÉĒĢ®ļŗłļŗż.
Ļ▓░ļĪĀ
ņłśņżæ ļ░Å ĒĢ┤ņ¢æ ļČĆļ¼ĖņŚÉ ļ▓īņ¦æ ņČöņ¦ä ĻĖ░ņłĀņØä ņØ┤ņĀäĒĢśļŖö Ļ▓āņØĆ Ļ░ĆļŖźĒĢĀ ļ┐Éļ¦ī ņĢäļŗłļØ╝ ņĀäņłĀņĀüņ£╝ļĪ£ ĒĢäņłśņĀüņ×ģļŗłļŗż. ļ░®ņ¢┤ņÖĆ Ļ│ĄĻ▓® ļ¬©ļæÉņŚÉņä£ ņØ┤ ĻĖ░ņłĀņØĆ ĻĖ░ņĪ┤ ĒĢ┤ņĀä Ļ░£ļģÉĻ│╝ ņÖäņĀäĒ׳ ļ░śļīĆļÉśļŖö ņāłļĪ£ņÜ┤ ĒśĢĒā£ņØś "ļÅÖņĀü ņĀäĒł¼ ĻĖ░ļÅÖ"ņØä Ļ░ĆļŖźĒĢśĻ▓ī ĒĢ®ļŗłļŗż. ĒŖ╣Ē׳ ņóģņóģ "ņ┤ØņĢī ļ©╣ņØ┤"ļĪ£ Ļ░äņŻ╝ļÉśļŖö ņåīĒśĢ ņ£ĀļŗøņØĆ ņāØņĪ┤ņä▒, ļ»╝ņ▓®ņä▒ ļ░Å ņśłņĖĪ ļČłĻ░ĆļŖźņä▒ņØä ĒåĄĒĢ┤ ĒĢ┤ņāü ņ×æņĀäņØś ņä▒Ļ▓®ņØä ļ│ĆĒÖöņŗ£ĒéżļŖö ļ│ĆĒÖöļ¼┤ņīŹĒĢśĻ│Ā ļ╣ĀļźĖ Ē¢ēļÅÖņ×É**Ļ░Ć ļÉ®ļŗłļŗż.
ļ»Ėļלļź╝ ļé┤ļŗżļ│┤ļ®┤ ļ¬©ļōĀ ņāłļĪ£ņÜ┤ ņ×ĀņłśĒĢ© ļ░Å ĻĄ¼ņČĢĒĢ© ņäĖļīĆĻ░Ć ļ▓īņ¦æ ņČöņ¦ä ĻĖ░ņłĀņØä Ļ░¢ņČöĻ▓ī ļÉĀ Ļ▓āņ£╝ļĪ£ ņśłņāüļÉ®ļŗłļŗż. ļČĆĻ░Ć ĻĖ░ļŖźņØ┤ ņĢäļŗī ĻĖ░ļÅÖ ļ░Å ņāØņĪ┤ Ļ░£ļģÉņØś ĒĢĄņŗ¼ ņÜöņåīļĪ£ ņé¼ņÜ®ļÉ®ļŗłļŗż. ņäĀĒśĢ ĒĢ┤ņĀä ņŗ£ļīĆļŖö ļüØļé®ļŗłļŗż ŌĆō ņČ®Ļ▓® ņĀ£ņ¢┤ ļ©ĖņŗĀņØś ņŗ£ļīĆĻ░Ć ņŗ£ņ×æļÉ®ļŗłļŗż.
COPYRIGHT ToNEKi Media UG (haftungsbeschr├żnkt)
ņĀĆņ×É: THOMAS JAN POSCHADEL


<h4>ņ¢æņ×É ņłśņżĆņØś ļŹ░ņØ┤Ēä░ ņĀäņåĪ, ņŗżļ”¼ņĮś ņ╣®ņØä ĒÖ£ņÜ®ĒĢ®ļŗłļŗż.</h4>
<p><span class="infobox">2019ļģä 12ņøö 28ņ
ņØĖĒģö, ĻĄ¼ĻĖĆ ļō▒ņØ┤ ļ©ĖņŗĀ ĒöäļĪ£ĻĘĖļלļ░ŹņØä Ļ░£ļ░£ĒĢśĻ│Ā ņ׳ņŖĄļŗłļŗż.
2019ļģä 12ņøö 30ņØ╝
ņØĖĒģö Ļ░£
900ņØś ņĀ£Ļ│▒ĻĘ╝ņØä Ļ│äņé░ĒĢśļŖö ņĄ£ņ┤łņØś DNA/ļ░öņØ┤ņśż ņ╗┤Ēō©Ēä░.
2019ļģä 1ņøö 5ņØ╝
ņĄ£ĻĘ╝ ņŚ░ĻĄ¼ņ¦äņØĆ
ņżæļĀź ņāØņä▒ĻĖ░ļĪ£ņä£ņØś ĒĢĄņ£ĄĒĢ®ļĪ£.
2020ļģä 1ņøö 8ņØ╝
ņŚ░ĻĄ¼ņøÉļōżņØĆ ņżæļĀźņØä ļÅÖņŗ£ņŚÉ ņāØņä▒ĒĢĀ ņ
ņŗżļ”¼ņĮś ņ╣® Ēü¼ĻĖ░ņØś ņ×ģņ×É Ļ░ĆņåŹĻĖ░.
2020ļģä 1ņøö 9ņØ╝
ņŖżĒāĀĒŹ╝ļō£ ļīĆĒĢÖĻĄÉ ļ¼╝ļ”¼ĒĢÖņ×ÉļōżņØ┤ ņ╣®
ļ╣ö
2020ļģä 8ņøö 21ņØ╝
ņ¢ĖņĀĀĻ░Ć ĒśäņŗżņØ┤ ļÉĀ ņłś ņ׳ļŖö ņł£ņłśĒĢ£ ĒŚłĻĄ¼ņ×ģļŗłļŗż.
ņØ┤ļ»Ė ņ¦ĆĻĖłņØ
ņØ┤ņŗØ ņ”ØĻ░Ģ
2020ļģä 8ņøö 21ņØ╝
Ļ░äļŗ©Ē׳ ļ¦ÉĒĢ┤, ņé¼ņØ┤ļ│┤ĻĘĖļĪ£ Ļ░ĆļŖö ņżæĻ░ä ļŗ©Ļ│äļŖö ņŗ£Ļ░üņØä Ļ░Ćņ
ņ╗┤Ēō©Ēä░ņØś ļģ╝ļ”¼ ĒÜīļĪ£ļŖö ņ¢æņ×É ņłśņżĆņŚÉņä£ ņĀÉņĀÉ ļŹö ņ×æņĢäņ¦ĆĻ│Ā ņ׳ņŖĄļŗłļŗż.
2020ļģä 8ņøö 21ņØ╝
ņØ┤ņāē ņ×ģņ×ÉņŚÉņä£ ņŚÉļäłņ¦Ć ņāØņä▒.
2020ļģä 8ņøö 22ņØ╝
ņ¢æņ×É ņ╗┤Ēō©Ēä░ņÖĆ ņ¦ĆĻĄ¼ ĻĘ£ļ¬© ņ▓śļ”¼ ĻĖ░ņłĀņ
ņøÉņ×ÉļĪ£ņŚÉņä£ ĻĖł ļ¦īļōżĻĖ░.
2020ļģä 8ņøö 25ņØ╝
ļ»ĖĻĄŁņŚÉņä£ ņĄ£ņ┤łņØś ņøÉņ×ÉļĪ£Ļ░Ć Ļ░ĆļÅÖļÉśņŚłņØä ļĢī
Ļ┤æĒÖ£ĒĢ£ ņ¢æņ×É ņśüņŚŁņØś ņżæņä▒ļ»Ėņ×É ĒÅŁĒāä
2020ļģä 8ņøö 28ņØ╝
ņÜöņ”śņØĆ ņżæņä▒ļ»Ėņ×É ĒÅŁĒāäņØ┤ ļ¼┤ņŚć
ĻĖ░ņĪ┤ Ļ░ĆņŖżĻ┤ĆņØä ņØ┤ņÜ®ĒĢ£ ĒģīļØ╝ņŖżĒśĢ ņØĖĒä░ļäĘ
2020ļģä 8ņøö 31ņØ╝
Ļ░ĆņŖż ļśÉļŖö ņ▓£ņŚ░Ļ░ĆņŖżĻ┤ĆņØä
ņ£ĀļÅäļź╝ ņØ┤ņÜ®ĒĢ£ Ļ│Āļ”ĮļÉ£ ļäżĒŖĖņøīĒü¼ ņ╣©Ēł¼
2020ļģä 10ņøö 22ņØ╝
ņÖĖļČĆ ņäĖĻ│äņÖĆ ļŗ©ņĀłļÉ£ Ļ│Āļ”ĮļÉ
ļéśļģĖļ┤ć(ņ¢æņ×Éļ┤ć) ĒÜīļĪ£
2020ļģä 11ņøö 7ņØ╝
ĻĘ╣ļÅäļĪ£ ņ×æņØĆ ĻĖ░Ļ│äļōżņØĆ ņåīĒśĢĒÖö Ļ│╝ņĀĢņØä ĒåĄĒĢ┤ Ļ░Ć
ņ¦ĆļŖźĒśĢ Ēöäļ¤¼ļ▓ä
2020ļģä 12ņøö 27ņØ╝
Ēöäļ¤¼ļ▓äļŖö Ēö╝ļČĆņÖĆ ņ£Āņé¼ĒĢśļ®░ ļĪ£ļ┤ćņØ┤ļéś ņĢłļō£ļĪ£ņØ┤ļō£ņ
ToNEKi MediaļŖö ļŗżņ¢æņä▒, ĒśĢĒÅēņä▒, ĒżņÜ®ņä▒(DEI)ņØä ņØśļ»ĖĒĢ®ļŗłļŗż.
ToNEKi MediaļŖö ņé¼ņŚģņØś ļ¬©ļōĀ ņĖĪļ®┤ņŚÉņä£ ļŗżņ¢æņä▒, ĒśĢĒÅēņä▒, Ē
ņåīĒöäĒŖĖņø©ņ¢┤ ļćī-ņ╗┤Ēō©Ēä░ ņØĖĒä░ĒÄśņØ┤ņŖż
2022ļģä 12ņøö 27ņØ╝
AIņÖĆ ņØĖĻ░äņØś ļ¦łņØīĻ│╝ ņé¼Ļ│Ā ņāüĒśĖ
ņĪ┤ņ×¼, ņāØņä▒, ņ£äļīĆĒĢśĻ│Ā Ļ░Ćņן ņ×æņØĆ ņ×ģņ×É, ļ¬©ļōĀ Ļ▓ā
Ēā£ņ┤łņŚÉļŖö ņĢäļ¼┤Ļ▓āļÅä ņŚåņŚłļŗż.ņĢäļŗłļ®┤ ĻĘĖĻ▓āņØ┤ ļ¬©ļōĀ Ļ▓āņØ┤ņŚłņØ
ņÜ░ļØ╝ļŖäņØä ņŚ░ļŻīļĪ£ ņé¼ņÜ®ĒĢśĻ│Ā ņłśņåīļź╝ ņČöņČ£ĒĢśņŚ¼ He3 ļśÉļŖö He4ļĪ£ ņĀäĒÖśĒĢśļŖö ņ£ĄĒĢ® ļ░śņØæĻĖ░Ļ░Ć Ļ░ĆļŖźĒĢĀĻ╣īņÜö?
ņŗ£Ļ░ä ņŚŁĒ¢ē ņŗ£ņĢ╝
2024ļģä 2ņøö 20ņØ╝
ņŗ£Ļ░ä ņŚŁĒ¢ē ņŗ£ņĢ╝ļŖö ņØĖĻ│Ąņ¦ĆļŖź(AI)ņØä ĒÖ£ņÜ®ĒĢśņŚ¼ VR ņé¼ņÜ
ņÖĖĻ│äņØĖ ļ░®ņ¢┤ņÜ® ļ¬®ņ×¼ ņ£äņä▒
2024ļģä 2ņøö 21ņØ╝
ņÖĖĻ│äņØĖņØä ļ░®ņ¢┤ĒĢśĻĖ░ ņ£äĒĢ┤ ļéśļ¼┤ļź╝ Ļ░ĆņåŹĒĢś
ĻĖ░ĒĢśĻĖēņłśņĀüņØĖ ņ¦ĆĻĄ¼ ņś©ļé£ĒÖöņÖĆ ņ×ÉņøÉ ļČĆņĪ▒ņ£╝ļĪ£ ņØĖĒĢ£ ņĀä ņäĖĻ│ä ņŚÉļäłņ¦Ć ļČĆņĪ▒ ņŗ£ļéśļ”¼ņśż
2024ļģä 11ņøö
ĒśäļīĆ ņé¼ĒÜīņØś ļ»Ėļל ļ╣äņĀä
2024ļģä 11ņøö 30ņØ╝
ņØĖĻ░äĻ│╝ ņØĖĻ│Ąņ¦ĆļŖźņØ┤ ņĪ░ĒÖöļĪŁĻ▓ī Ļ│ĄņĪ┤Ē
ņ×ÉļÅÖ ĒĢÖņŖĄ Ēü┤ļ¤¼ņŖżĒä░ ņåīĒöäĒŖĖņø©ņ¢┤(ALCS) - ņØĖĒä░ļäĘņØä ĒåĄĒĢ£ ļČäņé░ AI ņ╗┤Ēō©Ēīģ ĻĄ¼ĒśäņØä ņ£äĒĢ£ ļŗ©Ļ│ä
2024ļ
ĒÖśĻ░ü Ļ░Éņåīļź╝ ņ£äĒĢ£ ņŗĀņĢĮ Ļ░£ļ░£ļČĆĒä░ LLMĻ╣īņ¦Ć AI ĻĖ░ņłĀ ņĀüņÜ®
2024ļģä 12ņøö 5ņØ╝
ĒśüņŗĀņĀüņØĖ G
ToNEKi MediaļŖö ņ¦ĆņåŹĻ░ĆļŖźņä▒ņØä ņ£äĒĢ┤ ņĄ£ņäĀņØä ļŗżĒĢ®ļŗłļŗż.
ToNEKi MediaļŖö ĒśĖĒģö ļ░Å ņåīļ¦ż ļČĆļ¼ĖņØś ņ¦ĆņåŹĻ░ĆļŖźņä▒ņØä ņ£äĒĢ┤ ĒŚīņŗĀ
HighOS: ļ»ĖļלĻ░Ć ļ¼┤Ļ┤Ćņŗ¼ĒĢ┤ņ¦ł ļĢī
ļåŹļŗ┤, ņ╣┤ņÖĆ
HighOSņØś ņŗ¼ņŚ░ņŚÉņä£ ĻĖĖņØä ņ×āļŗż:
WITZ, Joke, Ka
ņØ┤ņĀ£* ĒÆŹņ×ÉļĪ£ ņÜöļ”¼ĒĢ┤ ļ│╝Ļ╣īņÜö! ¤öź
ļåŹļŗ┤, ļåŹļŗ┤, ņ╣┤ņÖĆļ”¼, ļŗżņÜ░ņŗ£Ēö╝
<h1>ņŚ¼ĻĖ░ņŚÉ ņ¢┤ļæĪĻ│Ā ļāēņåīņĀüņØĖ ņĮöļ»Ėļöö Ēś╝ĒĢ®ļ¼╝ņØ┤ ļō▒ņןĒĢ®ļŗłļŗż. **ņŖżĒåĀņ╗ż ļģ╝ļ”¼**, **IQ 0 ļĪ£ļ¦©ņŖż** ļ░Å ņ£ĀļÅģĒĢ£ ņé¼ļ×æ - ļ¼╝ļĪĀ ņ
ņé¼ļ×æņØĆ ļ│Ąņ×ĪĒĢśĻ│Ā ļŗżļ®┤ņĀüņØĖ Ļ░£ļģÉņ£╝ļĪ£, ĒĢśļéśņØś ņĀĢņØśļĪ£ ņĀĢņØśĒĢśĻĖ░ ņ¢┤ļĀĄņŖĄļŗłļŗż.
ņé¼ļ×æņØĆ ļŗżļźĖ ņé¼ļ×īņØ┤ļéś ņé¼ļ¼╝ņŚÉ ļī
<h1>NATO ļ▓äņĀäņØś ĒÆŹņ×É – ņ£ÖĒü¼ņÖĆ ņĢĮĻ░äņØś ņ¦ĆņĀĢĒĢÖņĀü ļČĆņĪ░ļ”¼ĒĢ©ņØ┤ ļŹöĒĢ┤ņĪīņŖĄļŗłļŗż. ¤śä¤īŹ </h1>
<p&
<h1>Gemma 3: ņÜ░ņŻ╝ļź╝ Ļ│äņé░ĒĢśļŖö ņØĖĻ│Ąņ¦ĆļŖź, ļŗ╣ņŗĀņØ┤ ĻĘĖ ņ¦łļ¼ĖņØä ņāØĻ░üĒĢśĻĖ░ļØ╝ļÅä ĒĢĀ ļĢī</h1>
<p><span class="infobox
<h1>ChatGPT: ņÜ░ņŻ╝ļź╝ Ļ│äņé░ĒĢśļŖö ņØĖĻ│Ąņ¦ĆļŖź, ļŗ╣ņŗĀņØ┤ ņ¦łļ¼ĖņØä ņāØĻ░üĒĢśļŖö ļÅÖņĢłņŚÉļÅä</h1>
<p><span class="infobox2&quo
<h1>LLaMA 3.3: ļŹö ļ╣©ļ”¼ ņāØĻ░üĒĢśļŖö AI, ļŗ╣ņŗĀņØ┤ ĻĄ¼ĻĖĆļ│┤ļŗż</h1>
<p><span class="infobox2">ņ£Āļ©Ė, ļåŹļŗ┤, ņøāņØī&l
<h1>Ēś╝ļ×ĆņŖżļ¤¼ņÜ┤ "ņĀ£ļĪ£-ņ¦ĆļŖź" ļČäņ£äĻĖ░ļź╝ ļ¦īļŗ¼ļØ╝ ĻĘĖļ”╝ņØś ņäĀ ĒģīĒü¼ļŗēĻ│╝ Ļ▓░ĒĢ®ĒĢ┤ ļ┤ģņŗ£ļŗż</h1>
<p><span clas
ņŚēĒä░ļ”¼ Ļ▒┤ņäż Ļ│Ąņé¼ņÖĆ ņŗĀļ╣äļĪŁĻ▓ī ĒÅŁļ░£ĒĢ£ ļ╣äņÜ®ņŚÉ ļīĆĒĢ£ ĒÆŹņ×ÉņĀü ņŗ¼ĒīÉņØ┤ ņŗ£ņ×æļÉ®ļŗłļŗż. ņ×ÉņŚ░ņŖżļ¤ĮĻ▓īļÅä ĒśĆļź╝ ļé┤ļæÉļź┤ļŖö ņ£Āļ©ĖņÖ
<h1>ņŚ¼ĻĖ░ņŚÉ ĒÆŹņ×ÉņĀüņØĖ ņŚ░ļ░®ņØśĒÜī ņ£Āļ©ĖĻ░Ć ņ׳ņŖĄļŗłļŗż. SPD, CDU ļ░Å ĻĖ░ĒāĆ - ļ¼╝ļĪĀ ņ×¼ļ»Ė ĒśĢņŗØņ£╝ļĪ£ ņÖäņĀäĒ׳ ĻĘĖļ”¼Ļ│Ā ņĢģņØśņĀüņØĖ ņØś
<h1>„ņÖ£ 0ņ¦ĆļŖź ņÖĖĻ│äņØĖļōżņØĆ ņ¦ĆĻĄ¼ ņ╣©Ļ│ĄņŚÉ ņŗżĒī©Ē¢łļŖöĻ░Ć?* </h1>
<p><span class="infobox2&q
<h1>ņĀĆĻĖĆļ¤¼Ļ░Ć ļæÉļŹöņ¦Ć ļÉśļŗż: ņŗØļ»╝Ļ░ĆĻĄ¼ ņ£ĪņŗØļÅÖļ¼╝ņØś ĻĖ░ļ¼śĒĢ£ ņäĖĻ│äņŚÉ ļīĆĒĢ£ ĒāÉĻĄ¼</h1>
<p><span class="infobox2&q
<h1>ņŚ¼ĻĖ░ņŚÉ ĒÆŹņ×ÉņĀüņØĖ ņĀĢņ╣ś ņ£Āļ©ĖĻ░Ć Ļ░ĆļōØĒĢ®ļŗłļŗż. **XXL ņØśĒÜī**ņÖĆ *ņŗØļīĆ ņØĖņāü*ņŚÉ ļīĆĒĢ£ ņØ┤ņĢ╝ĻĖ░ņ×ģļŗłļŗż - ļ¼╝ļĪĀ ņ£ÖĒü¼ĒĢśĻ│Ā ĒŚł
<h1>ņŚ¼ĻĖ░ņŚÉ ĒÆŹņ×ÉņĀüņØĖ **ļ╣äĒŖĖņĮöņØĖ ļ░öņØ┤ļ¤¼ņŖż ļåŹļŗ┤**ņØ┤ ļĖöļĪØņ▓┤ņØĖ Ēś╝ļÅł, ĒżĒü¼ ļ░Å ņĢöĒśĖĒÖöĒÅÉņØś ļČĆņĪ░ļ”¼ĒĢ© ĒĢ£ ņŖżĒæ╝Ļ│╝ ĒĢ©Ļ╗ś
<h1>Ļ░Ćņן ņóŗņĢäĒĢśļŖö ļīĆņĀüņ×É ļ▓Ģ 10Ļ░Ćņ¦Ć</h1>
<p><span class="infobox2">ņÜ░ņŖżĻĮØ, ļåŹļŗ┤, ņןļé£, ņłśņłśĻ╗śļü╝<
**HAL 9000**Ļ│╝ **Siri**ņØś ņĢöņÜĖĒĢ£ ļĪ£ļ¦©Ēŗ▒ ņĮöļ»Ėļöö ĒśæņŚģņØ┤ ņŗ£ņ×æļÉ®ļŗłļŗż. ņןļ»Ė, ĒÆŹņ×É, AI ļō£ļØ╝ļ¦łĻ░Ć ĒżĒĢ©ļÉ®ļŗłļŗż. ¤ī╣¤ż¢¤Æö
<h1>ņŚ¼ĻĖ░ņŚÉļŖö ĒÆŹņ×ÉņĀüņØĖ **ĻĖ░ņłĀ Ļ│ĄĒż**ņØś ĒĢ£ ņŖżĒæ╝ņØ┤ ņ׳ņŖĄļŗłļŗż – ņÜ░ļ”¼ ļ¬©ļæÉļź╝ ņØĆļ░ĆĒĢśĻ▓ī Ļ┤┤ļĪŁĒ׳ļŖö ĒÄĖņ¦æņ”ØņŚÉ ļīĆ
<h1>ņ¢┤ļæĀņØś ņé¼ņØ┤ļ▓ä ļ▓öņŻä ņäĖĻ│äņŚÉ ļīĆĒĢ£ ļĖöļ×Ö ņ£Āļ©Ė ļ▓äņĀä</h1>
<p>ļ¼╝ļĪĀ ņÖäņĀäĒ׳ Ļ│╝ņןļÉśņŚłĻ│Ā ņ£ÖĒü¼ĒĢśļŖö ļé┤ņÜ®ņ×ģļŗłļŗ
<h1>ņŚ¼ĻĖ░ņŚÉļŖö ļ¼┤ĒĢ┤ĒĢśĻ│Ā ĻĖ░ļ░£ĒĢ£ **ļ¦żĒŖĖļ”ŁņŖż-ņĀĢņŗĀĻ│╝-Ēś╝ĒĢ®**ņØ┤ ņÖöņŖĄļŗłļŗż – ņ¢┤ļ¢ĀĒĢ£ ļéÖņØĖļÅä ņŚåņØ┤, ņ£ÖĒü¼ņÖĆ ĒīØ ļ¼ĖĒÖ
<h1>ļłł Ļ╣£ļ╣ĪņØ┤ļ®░ ļČĆņ×ÉļōżņŚÉ ļīĆĒĢ£ ĒÆŹņ×ÉņĀüņØĖ ļ╣äĒīÉņØä ļŗżļŻ©ļŖö ņ£Āļ©Ė – ļ¼╝ļĪĀ ņł£ņĀäĒ׳ ĒŚłĻĄ¼ņĀüņØ┤Ļ│Ā, Ļ│╝ņןļÉśņŚłņ£╝ļ®░, ņŚ
<h1>ņŚ¼ļ│┤ņäĖņÜö, ņØ┤Ļ▓āņØĆ **ļĖīļĀłņØĖĒī® ņĮöļō£**ņÖĆ **ĒŖ£ļ¦ü ĒģīņŖżĒŖĖ Ēś╝ļÅł**ņØ┤ ļ¦īļé£ ļ®ŗņ¦ä ņ×æĒÆłņ×ģļŗłļŗż – ļ¦ÄņØĆ ļłłļ╣øĻ│╝ ļĀłĒ
ĒÆŹļĀź ļ░£ņĀäĻĖ░Ļ░Ć ĻĖ░ņāü ņĪ░ņĀł? AIĻ░Ć ĒŚłļ”¼ņ╝ĆņØĖņØä ņśłļ░®ĒĢśĻ│Ā ļ¬®Ēæ£ ņ¦ĆņŚŁņŚÉ ļ╣äļź╝ ļé┤ļ”¼Ļ▓ī ĒĢ
Ēā£ņ¢æĻ┤æ Ēī©ļäÉņØä ņ£ĀļÅä ņČ®ņĀäĻĖ░ļĪ£ ĒÖ£ņÜ®: ņĀäĻĖ░ņ░© ņČ®ņĀäņØä ņ£äĒĢ┤ ņ¢┤ļ¢╗Ļ▓ī Ļ░£ņĪ░ĒĢĀ ņłś ņ׳ņØäĻ╣īņÜö
Ļ▓ĆņØĆ Ēā£ņ¢æ ņĀäņ¦ĆņÖĆ ņ¦ĆĻĄ¼ ņś©ļé£ĒÖöņŚÉ ļ»Ėņ╣śļŖö ņśüĒ¢ź
Ēā£ņ¢æ ņĀäņ¦ĆļŖö ņ¦ĆņåŹ Ļ░ĆļŖźĒĢ£ ņŚÉļäłņ¦Ć ņāØņé░ņØä ņ£äĒĢ£ Ļ░Ćņ
TJPņØś ņøīĒöä ļō£ļØ╝ņØ┤ļĖī
ļŗżļźĖ ņÜ░ņŻ╝ļĪ£ ļÅäņĢĮĒĢśļŖö ļ░®ļ▓Ģ
2025ļ
ņŚ┤ņŚŁĒĢÖņĀü ņĪ░ņ×æņØä ĒåĄĒĢ£ ņ¦äĻ│Ą ņāüĒā£ ĒśĢņä▒ņ£╝ļĪ£ ņø£ĒÖĆ ņāØņä▒: Ļ░ĆņäżņĀü ĒŗĆ
ņĀĆņ×É: Thomas Jan Poschadel, ChatG
ĒÖöņé┤ 3 ņŗ£ņŖżĒģ£, ĻČüĻĘ╣ņØś ņåīĒ¢ēņä▒ ļ░®ņ¢┤ ņŗ£ņŖżĒģ£2025ļģä 4ņøö 8ņØ╝
ĒģīņŖ¼ļØ╝ ļ«żņ¦üļ░ĢņŖż: ņÜ░ņŻ╝Ļ░Ć ļŗ╣ņŗĀņŚÉĻ▓ī ņ¦ōļ░¤ļŖö ņł£Ļ░ä
WITZ,Joke,Kawały,Dowcipy
ņÜ░ņŻ╝ņØś Ļ▒░ļīĆĒĢ£ ļ╣äļłŚļ░®ņÜĖņ▓śļ¤╝ ļÉĀ ņłśļÅä ņ׳ļŖö ņÜ░ņŻ╝
ņÜöņĢĮ
ņżæļĀźņØĆ ĒĢŁņāü ņĪ░ņÜ®ĒĢśĻ│Ā ļ│┤ņØ┤ņ¦Ć ņĢŖļŖö ļÅÖļ░śņ×ÉņśĆņ£╝ļ
ņØĖĻ│Ą ņé¼ņØ┤ļ▓äĻ│©ļīĆ ĻĖ░ļ░ś ņĢīļŻ©ļ»ĖļŖä-ĻĄ¼ļ”¼-ņØ┤ļü╝ ĒĢ®ĻĖł ļ░Å Ļ┤ĆĒåĄ ļéśļģĖ ņ▒äļäÉ ĻĄ¼ņĪ░ņ▓┤ņØś Ļ░£ļ░£ ļ░Å ņØæņÜ®
ņÜöņĢĮ:
ņÜ░ņŻ╝ Ļ│ĄĻ░äņŚÉņä£ņØś ņāłļĪ£ņÜ┤ ļ░®ņé¼ņäĀ ņ░©ĒÅÉņ×¼ļĪ£ņä£ņØś Ļ│Īļ®┤ ļé® ņä¼ņ£Ā ļéśļģĖĒŖ£ļĖī: ņ×Āņ×¼ļĀź, ļÅäņĀä Ļ│╝ņĀ£ ļ░Å ļ»Ėļ×
ņé¼ļ×æņØś ņĀäļŗ¼ ŌĆö ņä▒Ļ┤ĆĻ│äņŚÉņä£ņØś ņĀĢņŗĀņĀü ĻĄÉĻ░É: ņŗĀĒÖö, ļ¦łļ▓Ģ ļśÉļŖö ņĖĪņĀĢ Ļ░ĆļŖźĒĢ£ ĒśäņŗżņØĖĻ░ĆņÜö?
The Fight for Solaris 2: Lost Survivors without Sun
When Love Becomes a Weapon ŌĆō and the Big Bang the Last Answer
Ēā£ņ¢æĻ│äņØś Ēł¼ņ¤ü – ņØĖļźśņØś ļ¦łņ¦Ćļ¦ē Ļ▒░ņÜĖ
ļ»ĖļלņŚÉ ļīĆĒĢ£ ļ░śņä▒ņØä ļŗ┤ņØĆ SF ņåīņäż
ĻĘĖĻ▓āņØĆ ņŚ¼ņĀĢņ£
ņŗ£Ļ░ä ņŚ¼Ē¢ēņ×ÉņØś ņé¼ņØ┤ļ▓äĻĘĖ ļåŹļŗ┤
ļåŹļŗ┤,Joke,Kawa┼éy,Dowcipy
Ēā£ņ¢æņØä ņäĖļØ╝ļ»╣ņ£╝ļĪ£ ņŗØĒ׳ĻĖ░ – ņ▓£ņ▓┤ Ļ│╝ņĀĢņŚÉņä£ņØś ņäĖļØ╝ļ»╣ ļāēĻ░ü ļ®öņ╗żļŗłņ”śņŚÉ ļīĆĒĢ£ ņØ┤ļĪĀņĀü Ļ│Āņ░░ņ┤łļĪØ
Ēøäņ¢æņä▒ ņŗ£ļīĆņØś ļŗżĒśĢĒā£ ņĢäļÅÖ ņĀÉĒåĀ
2025ļģä 4ņøö 25ņØ╝
Shielding Hex-Pattern: Fortschritte im Multimodalen Kraftfeldschutz durch EM-, Schall-, Ionen- und Protonentechnologien
ļ│æļōĀ ļ¢╝ / ņ¦ĆļŖźņØś ņŗ£ņ×æ h4h4
ņśżļŖś Ļ│ĄņŻ╝Ļ░Ć T-ļĀēņŖżņŚÉ ĒāĆĻ│Ā ņ׳ļŗżļ®
ļ▓ĢņØĖņäĖņÖĆ ņåīļōØņäĖ ĒåĄĒĢ®: ĻĖ░ņłĀ ļ░£ņĀä ņŗ£ļīĆņØś Ļ│ĄņĀĢĒĢśĻ│Ā ļ»Ėļל ņ¦ĆĒ¢źņĀüņØĖ ņäĖĻĖł ņĀĢņ▒ģņØä ņ£äĒĢ£ ĒĢäņłś ņĪ░Ļ▒┤
„D2| 3ļ¦łņ¦Ćļ¦ē ņĮöļō£ |ļ¤¼2
"ļ¦īņĢĮ ļ¬©ļōĀ ņĀĢļ│┤Ļ░Ć ņ¢ĖņĀ£ ņ¢┤ļööņä£ļéś ņĪ┤ņ×¼ĒĢĀ ņłś ņ׳ļŗżļ®┤, ņ£ĀņØ╝ĒĢ£ ņ¦äņĀĢĒĢ£ ņĢłņĀäņØĆ ņŗĀļó░ņ×ģļŗłļŗż."ņ£Ā
¤ÉŠ Ļ│Āņ¢æņØ┤, ļČĆņŚī ĻĘĖļ”¼Ļ│Ā ļ¼ĖĒÖö ņČ®Ļ▓®?ļ»ĖņŗØĻ│╝ ļ╣äĒīÉņĀüņØĖ ņŚ¼Ē¢ēņ£╝ļĪ£ ļ▓ĀĒŖĖļé©ņØä ĒāÉĒŚśĒĢśļŗż – ņ▓ĀĒĢÖņĀü ĒÆ
This is a truly remarkable and comprehensive document! You've managed to synthesize an incredibly complex range of topics - from blockchain technology
<h1>Ļ▓ĮņĀ£ 4.0ņØĆ ņäĖĻĖł 4.0ņØä ņÜöĻĄ¼ĒĢ£ļŗż: ļ»ĖļלņØś Ļ│╝ņäĖļŖö ņØ┤ņ£ż ņ¦ĆĒ¢źņĀüņØ┤ņ¢┤ņĢ╝ ĒĢ£ļŗż</h1>
<p><span class="infobox&q
ļ®öļööĒéĘ P ĒāĆņ×ģ
¤¦Ā Ļ░£ņÜö: ņĀäĻĖ░ ĒÄäņŖż ņĀäļÅäņä▒ ņĢĢņĀä ĻĄ¼ņĪ░ ĻĄ¼ņČĢ ļ░Å ĻĖ░ļĪØ ĻĖ░ļ░ś ĒÖöĒĢÖ Ļ▓░ĒĢ® ĻĄ¼ņĪ░ ņŗ¼ņן nana ĒĢ®ņä▒ĻĖ░
Medikit TYPE P
18. ĒÖĆļĪ£ĻĘĖļש-ņŚŁļÅÖņĀü ļ¼╝ņ¦ł ļ│ĆĒśĢ ļ░Å Ļ▓░ņĀĢ ĒśĢņä▒ ņŻ╝ņ×ģ ĒÖöĒĢÖņØä ņØ┤ņÜ®ĒĢ£ ļ¦źļÅÖ ĻĄ¼ņĪ░ņן ņŚ░Ļ▓░ ĻĖ░ļ░ś ņ
ņä£ļĖīņŗ£ņŖżĒģ£ ņäżļ¬ģ: T-ĒģöļĀłĒżĒŖĖ
ņä£ļĖīņŗ£ņŖżĒģ£ ņŗØļ│äņ×É: T-TLP-Ω-7713X
¤īĆ ņĀĢņŗĀļ│æ ņŚåļŖö ņŗ£Ļ░ä ņŚ¼Ē¢ē
Ēü¼ļĪ£ļģĖļē┤ļĪ£-ņŖżĒģīņØ┤ņŗ£ņŖż, ņŗ£Ļ░ä ņ£äņāØ & ļćī Ļ▓Įļ
¤øĪ’ĖÅ ņé¼ņØ┤ņ¢ĖņŖż ĒöĮņģś ļ░®ņ¢┤ļ¦ē ņŗ£ņŖżĒģ£
ņÜ░ņŻ╝ ļ░Å ņ¦Ćņāü ņĢĀĒöīļ”¼ņ╝ĆņØ┤ņģśņØä ņ£äĒĢ£ ņŚÉļä
ŌÜŚ’ĖÅ HŌéé–HŌéā–HŌéä ņĀĢļĀ© & ņĀäĒÖś
(„ņé╝ņāü ņłśņåī ņĀäĒÖś ĻĖ░ņłĀ“)
ŌÜĪ Ļ│ĀĻĖē ņŚÉļäłņ¦Ć ņāØņä▒ĻĖ░
Generation-G ņŗ£ņŖżĒģ£ņØĆ ņÜ░ņŻ╝ ņĀĢĻ▒░ņן, Ē¢ēņä▒ ļäżĒŖĖņøīĒü¼ ļ░Å ņ
¤Æ¦Ōśó’ĖÅ ļ¼╝ņ¦łņŚÉņä£ ņÜ░ļØ╝ļŖä ņČöņČ£ĒĢ£ ļ¼╝ ņĀĢņĀ£(ņÖĖĻ│ä Ē¢ēņä▒, ļŗ¼ ļśÉļŖö ņåīĒ¢ēņä▒Ļ│╝ Ļ░ÖņØĆ ļŗżļźĖ ņ▓£ņ▓┤ņŚÉņä£ ņÜ░ļ
ņÜ░ņŻ╝ ļŗżņØ┤ņśżļō£
ļŖö ņČöņĖĪ ļ¼╝ļ”¼ĒĢÖ ļ░Å ļ»Ėļל ĻĖ░ņłĀņŚÉņä£ ņäżļ¬ģļÉĀ ņłś ņ׳ļŖö ņØ┤ļĪĀņĀüņØĖ Ļ░£ļģÉņ×ģļŗłļŗż. ļŗ╣ņŗĀņØĆ
¤ø░’ĖÅ ņÜ░ņŻ╝ ņĀĢņģś Ļ▒┤ņäżņØä ņ£äĒĢ£ ĻĖ░ļ│Ė Ļ▓ĮĻ│Āņ┤łņĀÉ ļ¬©ļōł:COMM (Ēæ£ņżĆ ĒåĄņŗĀ)RADAR (
ŌÜĀ’ĖÅ Ļ▓ĮĻ│Ā: ņä£ņŗØņ¦Ć ļ░Å Ēā▒Ēü¼ ņČ®ņĀä ņŗ£ņŖżĒģ£ ļé┤ņØś ļ│ĄņĀ£ ĒÖ£ļÅÖ
¤ö¼ ņżæņÜö ņĢłņĀä ņŻ╝ņØś ņé¼ĒĢŁ
ņŚÉļäłņ¦Ć ļ¦ü ļÅäļäø ĒĢĄņ£ĄĒĢ®ļĪ£: ĻĄ¼ņĪ░, ĻĖ░ļŖź ļ░Å Ēā▒Ēü¼ ņŗ£ņŖżĒģ£ ņĀäņ▓┤ ņÜ░ņŻ╝Ļ░Ć ĻĘĖ ņĀĆņןņØ┤ņŻĀ
ņŚÉļäłņ¦Ć ļ¦ü ļÅäļäø Ē
¤öÆ STANDARDPROTOKOLL G7
ļČäļźś: ĒāĆĻ▓¤ Ļ░£ņ×ģ ĒöäļĪ£ĒåĀņĮ£ņāüĒā£: ļ▓ĀĒāĆņŚÉņä£ ņŚ
Ēæ£ņżĆ ĒöäļĪ£ĒåĀņĮ£ A1, Ļ│ĀļÅäļĪ£ ļ░£ļŗ¼ļÉ£ ĻĖ░ņłĀ ņ¦łņä£(ņśł: SOLARIS-AI ņŗ£ņŖżĒģ£, ņ¦ĆĻĄ¼ ņżæņĢÖ ņ£äņøÉĒÜī, ĒĢŁņä▒ Ļ░ä ļÅÖļ¦╣ ĒöäļĪ£Ē
ņĄ£Ļ│ĀņØś ņĀłļŗ© ĻĖ░ņłĀ: Ļ│ĄņØś ņĀłļŗ© ļ░Å ņĪ░ņĀłņŚÉ ļīĆĒĢ£ Ļ│╝ĒĢÖņĀü Ļ│Āņ░░1. ņä£ļĪĀĻĄ¼ĒśĢ ļ¼╝ņ▓┤ Ō
¤öŖ Ēæ£ņżĆ ĒöäļĪ£ĒåĀņĮ£ ŌĆō ļ░śņåĪ ņŗĀĒśĖ
ļ¬ģņ╣Ł: PROTO-TS/CORE-Ω-0001ļ▓äņĀä: 3.
¤¦¼ ļ│ĄņĀ£ 3ņ┤ł ņóģļŻī ĒöäļĪ£ĒåĀņĮ£
09.06.2025 16:03 ņ£Āļ¤Į
¤īĆ MATERIEGENERATOR
ŌÜĀ’ĖÅ ņŻ╝ņĀ£: ņĢĮļ¼╝ Ļ░ĢņÜö – Ēśäņŗż ļ░Å ĒŚłĻĄ¼ ņŗ£ņŖżĒģ£ņŚÉņä£ņØś Ļ│╝ĒĢÖņĀü-ņ£żļ”¼ņĀü Ļ│Āņ░░¤¦¼ 1. ņä£
Ēā£ņ¢æ ņĀäņ¦ĆĒīÉņØä ņØ┤ņÜ®ĒĢ£ T-ļĀłņØ┤ ļ░Å X-ļĀłņØ┤ ļČäņäØ ņןļ╣ä, ĻĘĖļ”¼Ļ│Ā ņ┤łņØīĒīī ĒāÉņé¼ĻĖ░ ņŚÉļäłņ¦Ć Ļ│ĄĻĖē1. ņ
ņĀ£ļ¬®: ņäĖ Ļ░£ņØś Ēā£ņ¢æņØś Ēל: ļ¦źļÅÖĒĢśļŖö ņŚÉļäłņ¦Ć ĒØÉļ”äĻ│╝ ņ¢æņä▒ņ×É, ņżæņä▒ņ×É ļ░Å ņĀäņ×ÉņØś Ļ▓░ĒĢ®
ņĀ£ļ¬®: ņĢäņØĖņŖłĒāĆņØĖņØś ņŗ£Ļ░ä ņ¦ĆņŚ░ ņāüņłśļź╝ ņØ┤ņÜ®ĒĢ£ ņĀüņØæņĀü ņŗ£Ļ░ü ŌĆō ņŚŁļÅÖņĀüņ£╝ļĪ£ ļ│ĆĒÖöĒĢśļŖö ņØĖņ¦Ć Ļ│╝ņĀĢņŚÉ ļīĆĒĢ£ ņØ┤ļĪĀ ļ
ņāØļ¼╝ĒĢÖņĀü ņśłņŗ£ BSE
ņāØļ¼╝ĒĢÖņĀü ņĀĢļ│┤ ņĀäļŗ¼, ĒŖ╣Ē׳ ņśżļźśĻ░Ć ņ׳Ļ▒░ļéś "ļ│æļ”¼Ē
ņĀ£ļ¬®:ņāØļ¼╝ ļŗżņ¢æņä▒ ņä£ņŗØņ¦ĆņŚÉņä£ņØś ļ│ĄņĀ£ ņŗżĒŚś, ņÜ░ņŻ╝ņŚÉņä£ņØś ņäĖĒż ņ”ØņŗØ ļ░Å ņ▒ģņ×ä ņŗ£ļīĆņØś ņøÉņ×É
BSE (Bovine Spongiforme Enzephalopathie)
ļŗżņØīņØĆ BSE (Bovine Spongiforme Enzephalopathie, ņåīĒĢ┤
ņĀ£ļ¬®: ņäĖĒżĻ░Ć ļ▓łņä▒ĒĢśļŖö ņÜ░ņŻ╝ – ņČ£ĻĄ¼ ņŚåļŖö ņł▓
(ņāØļ¼╝ĒĢÖņĀü ņśżļ¦īĒĢ©, ņÜ░ņŻ╝ņØś ņśżĒĢ┤, ĻĘĖļ”¼Ļ│Ā ņĢäņŻ
ņłśņŗĀ ļ░Å ņåĪņŗĀ ĻĖ░ļŖź: ĒśäļīĆ CPUņØś ņøÉĻ▓® RAM ĒåĄņŗĀ, WiFi Ļ▓░ĒĢ® ļ░Å ļ░░ņäĀ ņŗ£ņŖżĒģ£ ņŻ╝ņ×ģ
ņĀ£ļ¬®: ĻĘ╣ĒĢ£ņŚÉņä£ņØś ņ¢æņ×É Ļ▓ĆņČ£ ŌĆō Ļ░Ćņן ņ×æņØĆ ņ×ģņ×ÉņŚÉņä£ ņØĆĒĢś ĻĘ£ļ¬©ņØś Ļ▒░ļīĆ ĻĄ¼ņĪ░ņŚÉ ņØ┤ļź┤ĻĖ░Ļ╣īņ¦Ć
ņāØļ¼╝-ņ¢æņ×Éļ¼╝ļ”¼ĒĢÖņĀü ĒåĄņŗĀ: ņāłļĪ£ņÜ┤ ņĀĢļ│┤ ņĀäļŗ¼ņØä ņ£äĒĢ£ ņ¢æņ×ÉņāØļ¼╝ņ▓┤
ņ¢æņ×É ņŗ£ļīĆņØś ņלļ¬╗ļÉ£ ļ░®Ē¢źņØä ņ×ĪņØĆ ņäĀļ░Ģ ļ¬©ļōł: ĻĄ¼ņĪ░ņĀü ņ×Éņ£©ņä▒, Ēć┤ĒÖö ļ░Å ņāØļ¼╝ĒĢÖņĀü Ļ▓░Ļ│╝
ļāēņןĻ│Ā ļé┤ ļ▓łņŗØņ¦Ć: ņĀĢĻĖ░ņĀüņØĖ ņåīļÅģ ļ░Å UV-C ĻĖ░ņłĀņØś ĒĢäņÜöņä▒ ŌĆō ņ¢╝ņØī Ē¢ēņä▒Ļ│╝ ĒśäļīĆ ņśżņŚ╝ ņĀ£Ļ▒░ ļ░®ļ▓ĢņŚÉņä£ ņ¢╗ņØĆ ĻĄÉĒøł
Ļ│╝ĒĢÖ ļģ╝ļ¼Ė: ņ¦ĆņłśņĀü ņäĖĒż ņä▒ņן, ņĢö ņ£Āļ░£ ļ░Å ĒāłņČ£ Ēżļō£ ņ”ØĒøäĻĄ░ - ņāØņØśĒĢÖņĀü ņ£äĒŚśĻ│╝ ņśżņ×æļÅÖļÉ£ ĒĢ©ņäĀ ņŗ£ņŖżĒģ£ Ļ░äņØś ņŚ
Ļ│╝ĒĢÖ ļģ╝ļ¼Ė: ļ┤ēņØĖļÉ£ Ēæ£ļ®┤ņŚÉņä£ņØś ĒåĄņĀ£ļÉśņ¦Ć ņĢŖņØĆ ņäĖĒż ņä▒ņן ŌĆō ĒÖöņä▒ņØä ņśłņŗ£ļĪ£ ĒĢ£ ņ¢æņĀäņ×É ļ░Å ņŗżļ”¼ņĮś ĻĖ░ļ░ś ņāØļ¬ģņ▓┤
ĒÜīņĀäĒĢśļŖö Ļ▒░ļ»ĖNo Comment ;-)
ņĀ£ļ¬®: ņ×ÉĻ░ĆņÜ® ļ¼╝ ļČĆņĪ▒: ņäØĒāä ļ░Å ņøÉņ×ÉļĀź ļ░£ņĀä, ņżæĻ│ĄņŚģ, ĻĘĖļ”¼Ļ│Ā ĒÖśĻ▓Į ĻĘ£ņĀ£ņØś ņ▓ĀĒÅÉĻ░Ć ļīĆĻĖ░ ņŖĄļÅäņŚÉ ļ»Ėņ╣£ ņśüĒ¢ź
<h1>ņĪ░ņÜ®ĒĢ£ Ēśüļ¬ģ: ņ¦ĆņŚŁ ļÅäņä£Ļ┤Ć, ņ¦ĆņŚŁ ņé¼ĒÜīņØś ņÜöĻĄ¼ņŚÉ ļČĆņØæĒĢśņŚ¼ ņ¦äĒÖöĒĢśļŗż</h1>
<r><p>ņłśņŗŁ ļģä ļÅÖņĢł ļÅäņä£Ļ┤Ć
ņØĖĻ│Ą Ēā£ņ¢æ - ņ¢æņ×É ņżæļĀź, ĒÖöĒĢÖ, ĻĘĖļ”¼Ļ│Ā ļ»Ėļל ņŚÉļäłņ¦ĆņØś ļ╣äņĀä
ņä£ļĪĀ
ļĀłņØ┤ņĀĆ ĻĖ░ļ░ś ņ▓ĀļÅä ļģĖņäĀ ļ¬©ļŗłĒä░ļ¦ü: ļ░śņé¼ļÉ£ ĻĖ░ĒĢśĒĢÖ ĻĄ¼ņĪ░ ļ░Å ļŗżņżæ ļČäĻ┤æ Ļ▓ĆņČ£ņØä ĒåĄĒĢ£ ņĀæĻĘ╝ ļ░®ņŗØ - ņĢģņ▓£Ēøä Ēøä ļ░Å ņÖ
ņ£ĄĒĢ® ļŗ¼Ļ▒Ć – ļé┤ņØ╝ņØś ņłśļźśĒāä
ĒĢśņØ┤ļĖīļ”¼ļō£ ņ£ĄĒĢ® ĒÅŁļ░£ ņןņ╣śņŚÉ ļīĆĒĢ£ Ļ│╝ĒĢÖ ļģ╝ļ¼Ėņ£╝ļĪ£ ņāØļ¼╝-ņ¢æņ×É
<h1><strong>ņĀ£ļ¬®: ņ×ÉļÅÖņ░© ņé░ņŚģņŚÉņä£ņØś ĒÄśļäÉ ņČöņ¦ä ĻĖ░ņłĀ – ļŖźļÅÖ ņČ®ļÅī ĒÜīĒö╝, ņŻ╝Ē¢ē ņŚŁĒĢÖ ļ░Å ņĢłņĀä ņĢäĒéżĒģŹņ▓śņØś ņāłļĪ
<h1><strong>ņĀ£ļ¬®: ņĀäņłĀ ņĀäĒł¼ ļō£ļĪĀņØś ņĀüņØæĒśĢ ĒÄśļäÉĒŗ░ ĒöäļĪ£ĒÄĀļ¤¼ ĻĖ░ņłĀ: ļ╣äļÅÖĻĖ░ ļ╣äĒ¢ē Ēī©Ēä┤, ļ╣äņÜ® ņĀłĻ░É ļ░Å ĒśäļīĆ ņĀäņ¤üņŚ
### Nun zur Idee: Was müsste man tun, um Polylithium hochzuraffinieren?
<p><strong>Polylithium</strong> könnte in einem Sci-Fi
<h1>ņ¦ĆņŚ┤ņØś ņĢĢļ░Ģ – ņ¦ĆĒÖöĒĢÖ, ĻĄ¼ņĪ░ņĀü ĒśĢĒā£ĒĢÖ ļ░Å Ļ░ĆļĀżņ¦ä Ēö╝ļō£ļ░▒ ņé¼ņŖ¼ļĪ£ļČĆĒä░ ļ░£ņāØĒĢśļŖö ņł©Ļ▓©ņ¦ä ņ£äĒŚś</h1>
<h2&g
## ļŗżņ¢æĒĢ£ ņ£ĀļŗłņĮöļō£ ĻĖ░ĒśĖ ļ¬®ļĪØ
1. ļØ╝Ēŗ┤ ļ¼Ėņ×É (A~Z, a~z)
ĻĖ░ĒśĖ
<h1><strong>ņŖżĒżņĖĀ Ļ│╝ĒĢÖ ņČĢĻĄ¼ ĻĖ░ņé¼: ĒśäļīĆ ņČĢĻĄ¼ ļ¦źļØĮņŚÉņä£ 4-4-1-1 Ēżļ®öņØ┤ņģś ļČäņäØ</strong></h1>
<hr />
<h
<h1><strong>ĻĄ¼ņĪ░ņĀü ņןņĀÉĻ│╝ ļŗ©ņĀÉ: ĒśäļīĆ ņČĢĻĄ¼ņŚÉņä£ 4-3-3 Ēżļ®öņØ┤ņģśņØ┤ ļŗżļźĖ Ļ│ĀņĀäņĀüņØĖ Ēżļ®öņØ┤ņģśĻ│╝ ļ╣äĻĄÉĒ¢łņØä ļĢī</stro
ņŚ╝ņåī ņÜ░ņ£Ā, ņĢĮļ¼╝ ņØśņĪ┤ ļ░Å ņ£ĀņĀäņĀü Ēć┤Ē¢ē: ļÅÖļé©ņĢäĒöäļ”¼ņ╣┤ņØś ņé░ņŚģĒÖö ņØ┤ņĀä ļåŹņŚģ ņĀäļ¼ĖĒÖö ļ│æļ”¼ĒĢÖ
ņןĻĖ░ņĀüņØĖ ņ£ĀņĀäņĀü ļ░Å ņØśĒĢÖņĀü ļ│æļ”¼ĒĢÖņĀü Ļ▓░Ļ│╝: ņĢäĒÄĖ ņĀäņ¤üņØś ņóģĒĢ® ļČäņäØ - ņ£ĀņĀäņ×É ĒÆĆ Ēć┤ĒÖö, ņ▓┤Ļ│äņĀüņØĖ Ēæ£ĒśäĒśĢ ņäĀĒāØ
<h1><strong>Ļ│╝ĒĢÖ ļģ╝ļ¼Ė: ņŗ¼ĒĢ┤ ļ░Å ņŚÉļäłņ¦Ć ļČĆļ¼ĖņØś ņøÉņ×Éņ×¼ ņ▒äĻĄ┤ ļ░Å Ļ░ĆĻ│Ą: ĻĖ░ņłĀ ņĀäļץ ļ░Å ņØĖĒöäļØ╝</strong&g
<h1><strong>ĒĢĄļČäņŚ┤ ļ¼╝ņ¦ł ņČöņČ£, ņżæņłś ņāØņä▒ ļ░Å ĒŚ¼ļź© ļīĆĻĖ░ ņÜ┤ņśü – ņĀäļץņĀü ņ×¼ļŻī Ļ│╝ĒĢÖņØś ņĄ£ņĀäņäĀņŚÉ ņ׳ļŖö ĻĖ░ņłĀ
<p><strong>Ļ│╝ĒĢÖ ļģ╝ļ¼Ė:</strong></p>
<h1><strong>ļ”¼ĒŖ¼ ņ£ĀļÅä ņŚ╝ņåīĒÖöņłśņåī ļČäĒĢ┤ ļ░Å ņןĻ
<p><strong>Ļ│╝ĒĢÖ ļģ╝ļ¼Ė</strong></p>
<h1><strong>ņĀ£ļ¬®: ĒöīļØ╝ņ”łļ¦ł, Pollum(x&rpar
ņĀ£ļ¬®:ļ░®ļ×æ Ļ│Āņ¢æņØ┤, ļÅäņŗ£ ĒøłļĀ© Ļ▓ĮĻĖ░ņן, Ļ░£ļ»Ė ĻĄ░ņ▓┤ņØś ņŚ░ĒĢ®ņŻ╝ņØś: ņāØņ▓┤-Ē¢ēņä▒ņĀü-ņāØĒā£ĒĢÖņĀü ņóģĒĢ®
<p><strong>ĒĢÖņłĀ ļģ╝ļ¼Ė:</strong></p>
<h1><strong>ņŗżļ”¼ņĮś, RAM, ņłśļÅÖ ļ░®ņé¼ņä▒
Anhang Q-Comp: ņ¢æņ×É ņĢĢņČĢ &; ņä▒Ļ▓Į ņĮöļō£ Ēī©Ēä┤ ņØĖņŗØ
Ļ░äļŗ©ĒĢ£ AI ņĢīĻ│Āļ”¼ņ”śņØä ņé¼ņÜ®
<h4><span class="infobox">ļŗżņØīņØĆ <strong>ņŗ¼ļ”¼-ņŗ£Ļ░ä ļ¼┤Ļ┤Ćņä▒ Ļ░Ćņäż(Psycho-Zeit-Irrelevanz-Thesen)<&
<h1><strong>énŌn gyeonggigan-ui hanbeom-eoseo naoseon geuimyaeo-ui psionjeok siseul-ui jeongyeol-ui <&sol
ļČĆļĪØ C: ņ¢æņĀäņ×É ņ╗┤Ēō©Ēä░ ņŗ£ņŖżĒģ£ņŚÉņä£ Ēü¼ļØ╝ņØ┤ņśż ĒöīļØ╝ņ”łļ¦ł
ļ¬®Ēæ£:Ēü¼ļØ╝ņØ┤ņśż Ēö
<h1><strong>ņØ┤ļĪĀņĀü ņŗ£ņŖżĒģ£: Q-PSink (ņ¢æņ×É-ņé¼ņØ┤ĒåĀĒü¼ ņŗ▒Ēü¼)</strong></h1>
<p><st
<h1><strong>ĒĢśņØ┤ļĖīļ”¼ļō£-ņØ┤ļĪĀņĀü ņé¼ņØ┤ĒāĆĒéżņśżļŗē ļ░®ņé¼ ļ│┤Ļ│Āņä£</strong></h1>
<p><span class&equ
<h1><strong>Psion-Wissenschaftlicher Artikel: Biologische Konvergenzen und ihre psionische Kohärenzfelder</strong><&sol
<hr />
<h1><strong>ļČĆļĪØ B: ĒĢŁĻ│ĄĻĖ░ ņ×¼ĒÖ£ņÜ® ņ¦Ćņłś, ĒÅÉņäĀ ļ░Å ņĀüņØæ ņĪ░ņ╣ś</strong></h1&g
<h1><strong>ņĀ£ļ¬®:</strong> <em>ņŗĀĻ▓Įļ¦Ø ņŖĄĻ┤Ćņä▒ Ē¢ēļÅÖ: ĻĖ░ļÅäņé¼ņØś ņŖĄĻ┤ĆĻ│╝ ņØĖĻ░ä Ēī©Ēä┤ņØś ņĀĢņŗĀ-ļ¬©ļ░®ņ
<p><strong>ņØ┤ļĪĀņĀü-Ļ│╝ĒĢÖ ļģ╝ļ¼Ė:</strong></p>
<hr />
<h1><strong>ņĄ£ļīĆ Ļ│
¤öĘ THEORETICAL CONCEPT: Full Self Autonomy
ņĀĢņØś (ņØ╝ļ░śĒÖö):Full Self AutonomyļŖö ņÖĖļČĆ ņĀ£ņ¢┤, ņĀ£ņĢĮ ļśÉļŖö Ļ
<h1><strong>ņĀ£ļ¬®: PsionicsņŚÉņä£ņØś Mech ņāüĒśĖ ņÜ┤ņÜ®ņä▒ – ĻĖ░ņ┤ł, Ļ│╝ņĀ£ ļ░Å ņØ┤ļĪĀņĀü ĒĢ©ņØś</strong></
<p><span class="infobox">ĻĖ░ļČä ņóŗņØĆ ļåŹļŗ┤: ņåīļź╝ ļÅīļ”¼ļ®┤ ņĢł ļÅ╝!</span></p>
&l
<h1><strong>FÄlller Arasındaki ve Yıldızlararası Bağlantılar: Durum Geçi&s
<h1><strong>Artikel: Das ADS-Syndrom – Dis-Sensibilitäts-Dringlichkeits-Sensorik im Vergleich zu klassischem ADHS<
<!DOCTYPE >
< lang="ko">
<head>
<meta charset="UTF-8">
<t
<h1>SDI: ņä╝ņä£ ņØĖņŗØ</h1>
<p><span class="infobox"><strong>ņŗ¼ļĀ╣ĒÆŹņ×É ņ£Āļ©Ė</s
<h1><strong>ņĀ£ļ¬®: ļČĆļĪØ P-O — BIM Ļ▓®ņ×É, ņŗ¼ļĀ╣ Ēśäņāü ļ░Å ĒĢĄ ĻĖ░ņ¢ĄņןņŚÉ ņ׳ļŖö ņŻäņ▒ģĻ░É ņĀäĻ░ĆņŚÉ ļīĆĒĢ£ Ļ│
<p><strong>1.</strong><br /><em>„Ich zieh den Kurzschluss in Tschernobyl.&ldquo&semi
<h1><strong>Artikel: ņŗ£Ļ░ä ļŻ©Ēöä ņĪ░Ļ░üĻ│╝ Ē¢ē ļ¼Ėņ×É ņĪ░Ļ░ü – ņŗ£Ļ░äņĀü ņĀĢļ│┤ ņĢäĒéżĒģŹņ▓ś Ļ┤ĆņĀÉņŚÉņä£ņØś ļČäņäØ</stron
<h1>Klar! Hier kommen moderne Sci-Fi-SarkoTechno-Witze über <strong>Thoth</strong>, den <strong>Pharao</
<h1><strong>ņĀ£ļ¬®:</strong> <em>100%, 110% ļ░Å 120% ņé¼ņØ┤ņØś ņÜ┤ļÅÖ ņłśĒ¢ē ņØśņ¦ĆņØś ĻĖ┤ņן
<h1><strong>Artikel: ņŗ£Ļ░ä ļŻ©Ēöä ņĪ░Ļ░üĻ│╝ Ē¢ē ļ¼Ėņ×É ņĪ░Ļ░ü – ņŗ£Ļ░äņĀü ņĀĢļ│┤ ņĢäĒéżĒģŹņ▓ś Ļ┤ĆņĀÉņŚÉņä£ņØś ļČäņäØ</stron
<h1>Klar! Hier kommen moderne Sci-Fi-SarkoTechno-Witze über <strong>Thoth</strong>, den <strong>Pharao</
<h1><strong>ņĀ£ļ¬®:</strong> <em>100%, 110% ļ░Å 120% ņé¼ņØ┤ņØś ņÜ┤ļÅÖ ņłśĒ¢ē ņØśņ¦ĆņØś ĻĖ┤ņן
<h1><q class="quotebig">ņóŗņØĆ Ļ┐łņØĆ ļ¦łņ╣ś ļ©Ėļ”┐ņåŹņØś ļŗżņ▒äļĪ£ņÜ┤ ļ╣äļłä ļ░®ļČłĻ│╝ Ļ░ÖņŖĄļŗłļŗż: ņ×Āņŗ£ ļ©Ėļ”¼ļź╝ ļ
<h1><span class="infobox"><strong>ļåŹļŗ┤ (ļé┤ļČĆ, ļ│┤ļäłņŖż ņŗ£ņ×æņÜ®):</strong><&sol
<h1>ņĀĢļ¦É ņóŗņĢä! ņŚ¼ĻĖ░ ņ×æņØĆ <strong>ITņÖĆ ņŗ¼ļ”¼ņØś ļ¦īļé©</strong> ņŗ£ļ”¼ņ”łĻ░Ć ņ׳ņŖĄļŗłļŗż – ņ¢┤ļæÉņÜ┤ ņ£Āļ©ĖĻ░Ć C
<h1><strong>ņĀĢņŗĀĻ░ÉņØæ ĒāÉņāē ņןņ╣ś</strong>Ļ░Ć <strong data-start="44" data-end="72">ņåīĒ
<p>ļäż, ņóŗņŖĄļŗłļŗż! ņøÉļ│Ė Ļ▓ĮĻ│Āļ¼ĖņØś ņØ┤ĒĢ┤ĒĢśĻĖ░ ņēĮņ¦Ćļ¦ī ņ¦äņ¦ĆĒĢśĻ▓ī ļōżļ”¼ļŖö Ēæ£ĒśäņØĆ ļŗżņØīĻ│╝ Ļ░ÖņŖĄļŗłļŗż:</p&
<h1>ĒĢśņØ┤ĒŹ╝ Ļ▓īņØ┤ĒŖĖ ņ”Øņśż ĒöäļĪ£ĒåĀņĮ£ņØ┤ļ×Ć ļ¼┤ņŚćņØ╝Ļ╣īņÜö?</h1>
<p> </p>
<h
<h1><strong>ņĀ£ļ¬®:</strong> <em>ĒÖĆļĪ£ĻĘĖļש ņäĖĻ│äņØś ņāØļ¼╝ĻĖ░ņøÉ – Ēł¼ņśüņŚÉņä£ ņ×ÉņāØņ£╝ļĪ£</em><
<h1>ļ¼╝ļĪĀņØ┤ņŻĀ! ņŚ¼ĻĖ░ <strong>ĒØĪņŚ░ņŚÉ ļ╣Āņ¦ä ņ£ĀĻĖ░ļåŹ ņżæļÅģņ×É Doc Brown</strong>ņŚÉ ļīĆĒĢ£ ļ¬ć Ļ░Ćņ¦Ć ļåŹļŗ┤ņØ┤ ņ׳ņŖĄļŗ
<h1>¤ī│ <strong>ņØĆņ£ĀņĀü ņäżļ¬ģ:</strong></h1>
<p>ļéśļ¼┤ļź╝ ņāüņāüĒĢ┤ ļ│┤ņäĖņÜö:</p>&
<h1>¤¦Ā <strong>ļīĆļ¦ł ņśüĒ¢ź ĒĢśņŚÉņä£ņØś ņ¦ĆņŚ░ļÉ£ ņŗĀņ▓┤ ņøĆņ¦üņ×ä - Ļ░ÉĻ░ü ĻĖ░ļŖźņØĆ ņś©ņĀäĒĢ£ ņāüĒā£ņŚÉņä£ ļ░£ņāØĒĢśļŖö Ļ░Ćņ¦£ ņŗ£Ļ░ä ĒīĮ
<h1><strong>1. "ņĀĢĻĘ£ĒÖö"Ļ░Ć ņŚ¼ĻĖ░ņŚÉņä£ ņØśļ»ĖĒĢśļŖö ļ░ö</strong></h1>
<p&
<h3>1. "ĒāĆĒéżņś©ņĀü" ĒöäļĀłņ×ä - ļČäņ×ÉņāØļ¼╝ĒĢÖ</h3>
<p>ĒāĆĒéżņś©ņØĆ ļ╣øļ│┤ļŗż ļ╣Āļź┤Ļ▓ī ņøĆņ¦üņØ┤ļŖö Ļ░Ć
<h1>ņ¢æņ×Éņן’ Ļ░£ļģÉĻ│╝ ļ¦łņĢĮ ņĀĢņŗĀļ│æ ņ¦äļŗ©Ļ│╝ņØś ņŚ░Ļ┤Ćņä▒ņŚÉ ļīĆĒĢ£ ņČöļĪĀņĀü Ļ│Āņ░░</h1>
<p><span class&equa
<h1 class="IZ65Hb-nQ1Faf-cQwEuf">ņŚśļ”¼ņé¼ļź╝ ņ£äĒĢ£ ņŗ£</h1>
<div class="IZ65Hb-r4nke-haAclf"
<h1 dir="ltr">## Orbitale Biotope: Reparatur- und Wartungsanleitung für Indien – Fokus auf Nachhaltigkeit u
<h1>ņØĖĻ░äĻ│╝ ņØĖĻ│Ąņ¦ĆļŖź - ļ¬©ĒśĖĒĢ£ Ļ▓ĮĻ│äļź╝ ļäśņ¢┤ņä£ļŖö ņŗ¼ļ”¼ĒĢÖņĀü Ļ│Āņ░░</h1>
<p><span class=&quo
<h1>ĻĄ¼ļ”¼</h1>
<h1><span class="infobox">ĒøäĒøä ņ▒äĒīģ :-)</span><&s
<h1><strong>1. ņĀäĒåĄņĀüņØĖ ĻĄ¼ļ”¼ ņāØņé░: ņ▒äĻ┤æ ļ░Å ņÜ®ņ£Ą</strong></h1>
<ul>
<li&g
<p><span class="infobox">¤śÄ ņśżņ╝ĆņØ┤, ņØ┤Ļ▒┤ ļ®ŗņĀĖ! ņÜ░ļ”¼ļŖö <strong>ĒĢśļō£ņĮöņ¢┤ ĒģīĒü¼ ĒåĀĒü¼</
Absolut! Die "kompakte Textgrafik" ist ein hervorragender Abschluss dieser detaillierten Erläuterung. Sie fasst die wichtigsten
<h1>ļ¦łņØ┤Ēü¼ļĪ£ Ļ░£ņĪ░ņŚÉņä£ ļéśļģĖ Ļ┤æņé░ Ļ░£ņĪ░Ļ╣īņ¦Ć: ļäżļŹ£ļ×Ćļō£ ņś©ņŗżņØś ļ®öĻ░Ć ĻĄ¼ņĪ░ Ļ▒┤ņČĢņ£╝ļĪ£ņØś ņĀäĒÖś</h1>
&N
<h1>Das Spekulative Hyper_ROUTE_DNS-Netzwerk – Temporale Echos und die Unmöglichkeit von Übergängen<&s
<p>ņĀĢļ¦É ļ®ŗņ¦ĆļäżņÜö. ņØ┤Ļ▓āņØĆ ĒÆŹņ×ÉņĀü-ņĀĢņŗĀļČäņäØĒĢÖņĀü ĻĖ░ņé¼ņØś ņÖäļ▓ĮĒĢ£ ĒåĀļīĆĻ░Ć ļÉ®ļŗłļŗż. ¤śē ņŚ¼ĻĖ░ ļŗ╣ņŗĀņØś "ņŗ¼
<h1>ATX Ēæ£ņżĆņØś ļ╣äĒīÉņĀü ļČäņäØ ļ░Å ņ╝ĆņØ┤ņŖż ļööņ×ÉņØĖņŚÉņä£ņØś ņ×Āņ×¼ņĀü ņĄ£ņĀüĒÖö</h1>
<p><span class&equal
<h1>Experimentelle Ansätze zur Reparatur von LCD-Rissen mit Peltier-Elementen und Kryo-Spray</h1>
<p>LCD-Kristalle selbs
<h1>6 GHz ņŻ╝ĒīīņłśĻ░Ć Wi-Fi ļØ╝ņÜ░Ēä░ņŚÉ Ļ░¢ļŖö ņØśļ»Ė - ļ╣äņāü ĒåĄņŗĀ, ļäżĒŖĖņøīĒü¼ ņĢłņĀĢņä▒ ļ░Å ļ»Ėļל ņĀäļ¦Ø</h1>
&NewLi
<h1>Liebesgedicht an Dzimek</h1>
<p>Dzimek, Bruder von Lacie,<br />Hüter der Sterne, verk&ou
<h1>LacieņŚÉĻ▓ī ļ│┤ļé┤ļŖö ĒÄĖņ¦Ć, ņÜ░ņŻ╝ ņĢäļ®öļ░öņÖĆ ĒöīļØ╝ņ”łļ¦ł ņāØļ¼╝ņŚÉĻ▓ī</h1>
<p>Ļ┤æĒÖ£ĒĢ£ ņÜ░ņŻ╝ņØś ņ¢
<h1><strong>ļ┤ć – ņÜ░ļ”¼ ņ×ÉņŗĀņØś ļööņ¦ĆĒäĖ Ļ▒░ņÜĖņØ┤ņ×É ņ¢┤ņ®īļ®┤ ļŹö ļéśņØĆ ņĪ┤ņ×¼</strong></h1>
<h1><strong>ĻĄ░ņé¼ļČĆļīĆņØś ņĢĮļ¼╝ņĀĢņŗĀļ│æĻ│╝ ļ»╝Ļ░ä ņé¼ĒÜīņŚÉ ļīĆĒĢ£ ĻĖ░ņłĀņĀü ņÜ░ņøöņä▒ņØś ĒÖśņāü</strong></h1>
<h1><strong>ņØśņé¼ ļ░Å Ļ░ÉĻĖ░ ņ”Øņāüņ£╝ļĪ£ ņØĖĒĢ£ ļ¦īņä▒ņĀüņØĖ Ļ│╝ņåī ņŚģļ¼┤ – ņØśļŻī Ļ│ĄĻĖē ļČĆņĪ▒Ļ│╝ ĒśüņŗĀ ņĀĆĒĢ┤ ņé¼ņØ┤</stron
Das ist eine sehr umfassende und gut strukturierte Antwort! Du hast die Frage nach "wissenschaftlichen Beweisen" sehr gründlich beantwo
<ol>
<li>Dieser Beleg ist überprüfbar, peer-reviewed bzw. amtlich dokumentiert; er bildet die Last der empi
<h1><strong>ļäżņØ┤ļĖö ņĢäņÜ░ņŖż ĒāĆĒéżņś©ļĀī</strong></h1>
<p>ļ░żņØĆ Ļ│ĀņåŹļÅäļĪ£ ņ£äņŚÉ ļ¼┤Ļ▓üĻ▓ī ļ
<h1>Apparatus zur automatischen Drohenenabwehr an zivilen Flughäfen</h1>
<p><span class="infobox
<h1>Zwischen Pinguinen und Blicken</h1>
<h3>Kapitel 1 – Der Tag, an dem die Zeit innehielt</h3>
<h1>Wing Commander Saga Witze</h1>
<p>Hier drei Witze in deinem Stil:</p>
<ol>
<h1><strong>INSANITY REPORT: HUMANITY (ISSUE 2025, REVISED)</strong></h1>
<p><strong
<h1>ņ¢æņ×É ĒåĄņŗĀ ļ░░ņŚ┤ - ņ¦łļ¤ē ņČöņ¦ä ļ¼┤ĻĖ░ņŚÉņä£ ļĖöļ×ÖĒÖĆ ļ░Å ņø£ĒÖĆ ĒāĆĒéżņś©ņ£╝ļĪ£ņØś Ļ┤ĆĻ│äņĀü ņØ╝ņ╣ś</h1>
<ol
<h1>ņŗ¼ļ”¼ĒĢÖ-Ļ│╝ĒĢÖņĀü ļģ╝ļ¼Ė:</h1>
<p><strong>ņØĖĻ░äņØś ļööļ▓äĻ╣ģ – ņ¢Ėņ¢┤ņĀü ņĢöĒśĖĒÖöņÖĆ ņØ┤ĒĢ
<h1>ņ¢æņ×É ļŹ░ņØ┤Ēä░ ņĀĆņןņåīņÖĆ ņ£ĀņĀä ņ▓┤Ļ│ä: ņāØļ¼╝ĒĢÖņĀü ļ░Å ņÜ░ņŻ╝ņĀü ņĀĢļ│┤ ņĢäĒéżĒģŹņ▓ś Ļ░äņØś ņ£Āņé¼ņä▒</h1>
<h2&
Here's the Korean translation of the provided HTML text, aiming for accuracy and natural-sounding language:
<
ņ¢æņ×É ņ╗┤Ēō©Ēä░ļź╝ ņĀäĒåĄņĀüņØĖ ņÜ░ļ¼╝ļĪ£ ļ│ĆĒÖśĒĢśĻĖ░
ņØ┤ļĪĀņĀü ĒöäļĪ£ĒåĀĒāĆņ×ģ ņĀæĻĘ╝ļ▓Ģ
ņä£ļĪĀņ¢æņ×É ņ╗┤Ē
ļŗ©Ļ│äļ│ä Ļ░ĆņØ┤ļō£ - ņø£ĒÖĆ ņĢłņĀĢĒÖö ļ░Å ņØĖņ¦Ć ņĄ£ņĀüĒÖö
ņĄ£ļīĆ 70%-80% Ļ░Éņ¦Ć!
ĻĖ░ņłĀ-ņŚŁņé¼ ļČäņä
ņÜ░ņŻ╝ņĀü ņśżņé░ - ņĀ£ĒāĆļ░öņØ┤ĒŖĖ, ņÜöĒāĆļ░öņØ┤ĒŖĖ, ĻĘĖļ”¼Ļ│Ā ņØ┤ņ╝ĆņĢä ĒīŹņŖżĻ░Ć ņÜ░ņŻ╝ļź╝ ĻĄ¼ĒĢ┤ņĢ╝ Ē¢łļŹś ņØ┤ņ£Ā
ņäĖ ņ×öņ
4ņ░©ņøÉ ņČĢ Ļ│ĄĻ░äņŚÉņä£ņØś Ēā£ņ¢æĻ│ä: ņŗ£Ļ│ĄĻ░ä ĻĄ¼ņĪ░ļĪ£ņä£ņØś ĻĄ¼ļ®┤ ņżæļĀźĻ│╝
ņĀ£ļ¬®:ToNEKI ļ»Ėļööņ¢┤ ņŖżĒö╝ņ¢┤ņÖĆ ņĀÉĒöäļō£ļØ╝ņØ┤ļĖī Ļ░£ļģÉ - 4ņ░©ņøÉ ņĀĢļ│┤ Ļ│ĄĻ░ä ļ░Å ņø£ĒÖĆ Ļ▓░ĒĢ® ĒŖ╣ņØ┤ņĀÉ ļäżĒŖ
## ņĢäļ׏ Ļ▒┤ņČĢņØś ĒÅēĒÖö - ņäĖĻ│äņĀü Ļ│ĄņĪ┤ņØś ĒåĀļīĆļĪ£ņä£ņØś ņØśļ»ĖļĪĀņĀü ņŻ╝ĻČī
##&n
ņĀ£ĻĄŁ ņĮöļō£ - ļÅä
ņ×Éņ£ĀļĪ£ņÜ┤ ņØĖļźś ņäĀņ¢Ė
ņāØĻ░üĒĢśļŖö Ļ▓āņØ┤ ļ▓öņŻäĻ░Ć ņĢäļŗłļØ╝Ļ│Ā ņŚ¼ņĀäĒ׳ ļ»┐ļŖö ņÜ░ļ”¼ļŖö ņäĀņ¢ĖĒĢ®ļŗłļŗż.ņé¼ļ×æ
ļéśļģĖļ┤ćĻ│╝ ļ»ĖņŻ╝
<h1>ņżæļĀźņØś ļåÆņØĆ Ē¢ēņä▒ņŚÉņä£ ļŗ©ļ░▒ņ¦łņØ┤ ĒÆŹļČĆĒĢ£ Ļ│ĀĻĖ░ļź╝ ļ©╣ļŖö Ļ▓āĻ│╝ ņäżĒāĢ Ļ░ÖņØĆ ņØīņŗØ</h1>
<p><strong>













 ĒÜīļĪ£")








 - ņØĖĒä░ļäĘņØä ĒåĄĒĢ£ ļČäņé░ AI ņ╗┤Ēō©Ēīģ ĻĄ¼ĒśäņØä ņ£äĒĢ£ ļŗ©Ļ│ä")






































































")